基于DSP的光伏电池最大功率点跟踪系统
2 MPPT基本原理
MPPT的实现实质上是一个动态自寻优过程,通过对阵列当前输出电压与电流的检测,得到当前阵列输出功率,再与已被存储的前一时刻功率相比较,舍小取大,再检测,再比较,如此周而复始。MPPT控制系统的DC-DC变换的主电路采用Boost升压电路。图4为Boost变换器的主电路,电路由开关管T、二极管D、电感L、电容C组成。工作的原理为在开关T导通时,二极管D反偏,太阳能电池阵列向电感L存储电能;当开关T断开时,二极管导通,由电感L和电池阵列共同向负载充电,同时还给电容C充电,电感两端的电压与输入电源的电压叠加,使输出端产生高于输入端的电压。Boost电路输入输出的电压关系为: V0=VI/(1-D) (1)
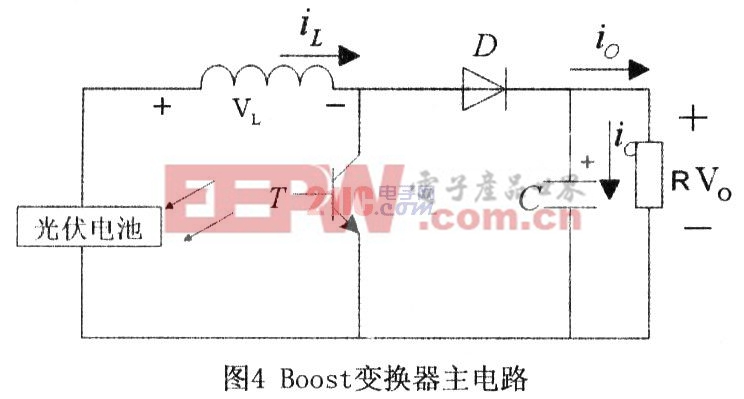
当Boost变换器工作在电流连续条件下时,从式(1)可以得到其变压比仅与占空比D有关而与负载无关,所以只要有合适的开路电压,通过改变.Boost变换器的占空比D就能找到与太阳能电池最大功率点相对应的VI。
3 MPPT控制的实现
3.1 控制算法
目前实现太阳能MPPT常用的算法有扰动观察法(PO)和电导增量法(INC)。前者的算法结构简单、检测参数少,应用较普遍,但在最大功率点附近,其波动较大;后者的算法波动较小,但较为复杂,跟踪过程需花费相当长的时间去执行A/D转换。
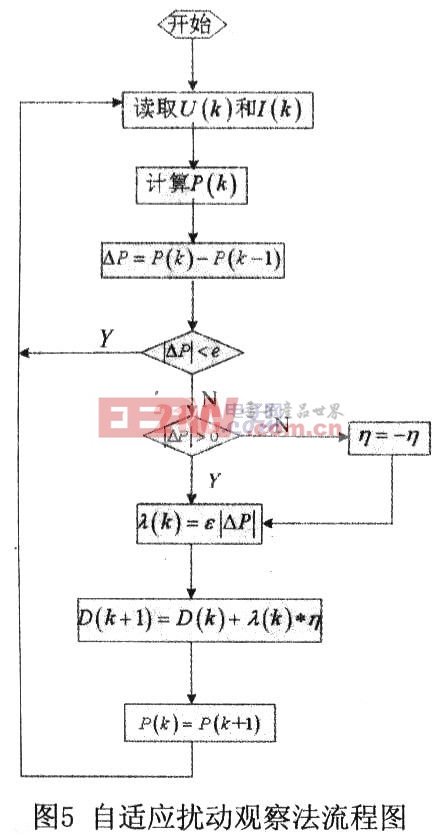
系统采用自适应扰动观察法,通过对扰动观察法的改进,引进一个变步长参数λ(k)来解决在最大功率点附近波动大的问题,其中λ(k)=ε|△P|式中ε是一个恒定的常数,自适应扰动观察法的程序流程图如图5所示。图中e决定了跟踪精度,λ(k)为占空比步长,决定功率变化的步长,η为扰动方向控制系数,取值为1。当|△P|e时,认为系统已经达到最大功率点附近,λ(k)的值将自动调节变小来满足动态调节步长的要求。
3.2 硬件实现
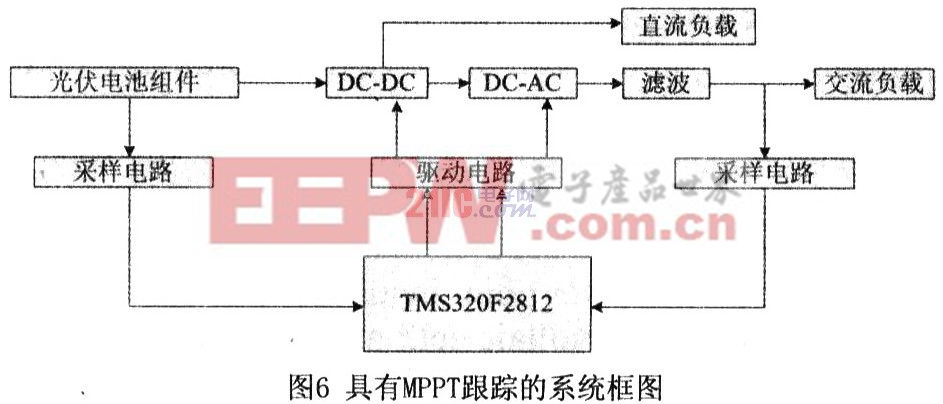
控制电路使用TI公司的TMS320F2812 DSP作为主控制芯片,其快速的运算能力、丰富的外设资源能为整个控制系统提供一个良好的平台。DSP是整个控制系统的核心,它接受采样电路送来的模拟信号,按照控制算法对采样信号进行处理,然后产生所需要的PWM波形,经驱动放大后控制主电路功率开关管的通断,从而实现MPPT。TMS320F2812在时钟频率150MHz下,其时钟周期仅为6.67ns,8通道16位PWM脉宽调制,2×8通道12位A/D转换模块,一次A/D转换最快转换周期仅为200ns。TMS320F2812 DSP芯片的这些特点能够满足MPPT控制精度和速度的要求。
采用其中两路A/D转换输入通道作为太阳能电池的输出电流和电压的采集通道,经过MPPT控制产生驱动PWM波形控制DC-DC开关管的导通时间,其控制的框图如图6所示。










评论