采用BoostPWMDC/DC变换器的正弦波逆变器
由式(6)和式(3)比较可知,采用三阶SPWM控制法比两阶SPWM控制法,具有更小的谐波含量。
4.1.3 三阶交互式SPWM控制
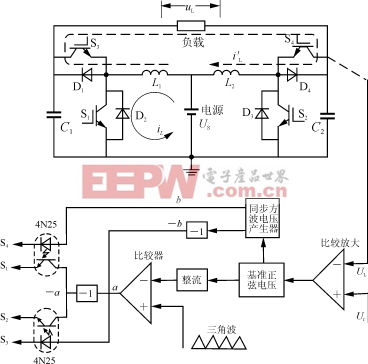
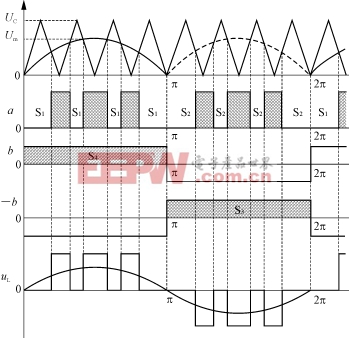
Boost逆变器的三阶交互式SPWM控制电路如图6(a)所示,图6(b)为工作波形图。这种控制方式的特点是,逆变器的左臂工作在uL的正半周,右臂工作在uL的负半周,左右臂交互工作,即可使逆变器输出一个完整的电压uL波形。uL的傅里叶级数表示式与式(6)相同。占空比D的确定,及D工作区间(1-D)~D的确定,也与三阶SPWM控制法相同。实际上,三阶交互式SPWM控制法是三阶SPWM控制法的变形。
(a)原理电路
(b)工作波形图
图6 Boost逆变器的三阶交互式SPWM控制电路
4.2 滑模控制法
滑模控制法适合于变结构系统,滑模变结构控制理论产生于上世纪50年代,现在已发展成为一种完备的控制系统设计方法。这种控制法实质上是一种用高频开关控制的状态反馈系统。滑模控制的特点是稳定性好,鲁棒性(Robustness)强,动态性能好,实现容易。
滑模控制的原理是利用高速切换的开关控制,把受控的非线性系统的状态轨迹,引向一个预先指定的状态平均空间平面(滑模面)上,随后系统的状态轨迹就限定在这个平面上。滑模控制系统的设计有两个方面:一是寻求滑模面函数,使系统在滑模面上的运动逐渐稳定且品质优良;二是设计变结构控制,使系统可以由相空间的任一点在有限的时间内达到滑模面,并在滑模面上形成滑模控制区。
Boost逆变器的滑模控制系统框图如图7所示,u~是逆变器的输出电压;uL为低通滤波器的输出电压(即负载电压);uL′是负载电压uL的一阶导数;ur为基准正弦电压;ur′为ur的一阶导数;u是控制变量,u为高电平时,代表u~最大,u是为低电平时,代表u~最小;K1,KL分别是加权数,即反馈增益;σ为开关控制律。控制电路由开关控制律形成电路和逻辑判断与触发电路两部分组成。
开关控制律如式(7)所示
σ=K1(ur-uL)+K2(ur-uL)≥0 (7)
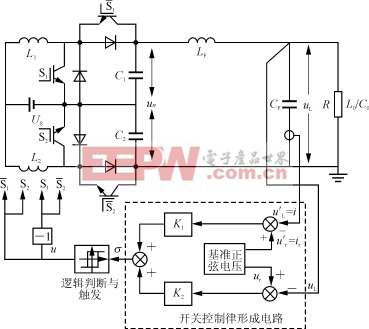
图7 Boost逆变器的滑模控制系统框图
当σ>0时,控制量u为高电平,代表u~为u~最大;当σ0时,控制量u为低电平,代表u~为u~最小。
用滑模控制法的Boost逆变器,动态性能好,系统具有降阶性和鲁棒性。滑模控制属于目标控制法,可以预先构造闭环特性,适用于动态性能要求高的Boost逆变器。
4.3 函数控制法
函数控制法的工作原理是:首先用开关函数表示出主电路电子开关的通断作用,得出其等效电路,并找出包含最重要控制信息的主电路动态方程式,写出开关函数与主电路变量之间的函数关系。然后在控制电路中再加入误差放大环节,并满足约束条件,从而导出开关函数与控制电路变量之间的函数关系,即得到系统的函数控制律。对于Boost逆变器有
![]() (8)
(8)
式中:S动态开关函数是逆变器的输入控制量;
ua,ub为逆变器a点和b点的电压;
i1,i2为流过电感L1和L2的电流。
函数控制Boost逆变器框图如图8所示。图中X是逆变器的中间输出量,也是控制电路的中间输入变量。函数控制逆变器的特点是系统绝对稳定,响应速度快,无过冲与超调,能完全抑制电源电压Us及负载阻抗大,小信号扰动的影响,输出电压uL与Boost逆变器参数无关,能适应各种性质的负载,但实现比较困难。
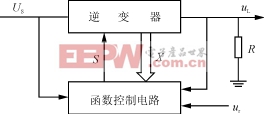
图8 Boost逆变器的函数控制系统框图
4.4 离散控制法
离散控制法通过选择适当的反馈变量的离散采样值,诸如输出电压uL的离散采样值uL(nT);电感电流离散采样值i1(nT)和i2(nT);输出电流离散采样值iL(nT);预估控制约束条件为U(n+1)T-Ur=k[U(nT)-Ur](式中nT表示离散时间,T为开关周期)。人为地构造出控制律,以便抑制输入及负载扰动对输出电压的影响,获得比较理想的输出特性。
离散控制法Boost逆变器主电路的离散分析相当复杂,离散量控制律的实现也十分麻烦,预估值需按经验确定,故在应用中有一定限制。

pwm相关文章:pwm原理








评论