高速公路汽车追尾预警系统设计
2.5 电源模块
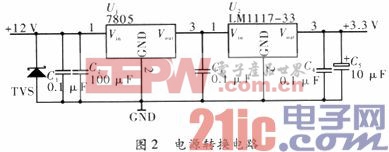
电源模块负责给所有模块供电。ATmega128L的工作电压为2.7~5.5 V,ARS100—3的工作电压为10~18 V,外围电路工作电压为3.3 V,汽车蓄电池的电压为12 V,系统最佳工作电压为3.3 V,因此需要将12 V电压转换为3.3 V。可以通过三端固定式集成稳压芯片W7805和三端可调正稳压器集成电路LM117~33实现。电源转换电路如图2所示。本文引用地址:http://www.eepw.com.cn/article/175828.htm
3 软件设计
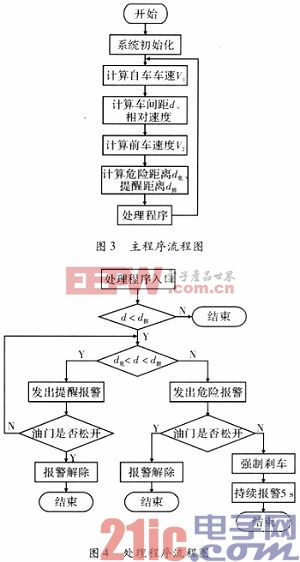
系统软件采用汇编语言与C语言混合编程的方式,汇编语言用于系统启动和初始化程序的编写,计算、判断、处理等程序采用C语言完成。系统主要包括主程序、初始化程序、相对距离和相对速度子程序、确定防撞模型子程序、处理子程序。主程序负责系统的启动、初始化、根据具体情况调用相应子程序。相对距离和相对速度子程序用于确定自车和前方车辆之间的相对距离和相对速度。确定防撞模型子程序根据计算出的相对距离确定合适的防撞模型公式,计算出提醒距离和危险距离。处理子程序根据相对距离、提醒距离、危险距离确定自车当前状态,采取相应措施。图3和图4分别是主程序和处理程序的流程图。
4 结束语
文中结合高速公路交通事故频发的现状,设计了一套高速公路汽车追尾预警系统,该系统能够有效降低交通事故的发生率。当然,能够实现这一目的的方法有多种,但由于经济成本过高,增加了车主的负担。文中采用低功耗的AVR单片机做主控芯片,成本低廉,体现了经济性和实用性的原则。

霍尔传感器相关文章:霍尔传感器工作原理
蜂鸣器相关文章:蜂鸣器原理 霍尔传感器相关文章:霍尔传感器原理









评论