单片机在赤道式天文望远镜控制系统中的应用
MOV TCON,#50H; 定时器/计数器状态设置
MOV TMOD,#21H; 定时器/计数器方式设置
MOV PCON,#00H; 电源控制器设置
MOV SCON,#53H; 串行口0工作方式设置
MOV TL1,#0FDH; 计数常数设置
MOV TH1,#0FDH
MOV SCON1,#53H; 串行口1工作方式设置
MOV TH0,#3CH; 计数常数设置
MOV TL0,#0B0H
RET; 返回
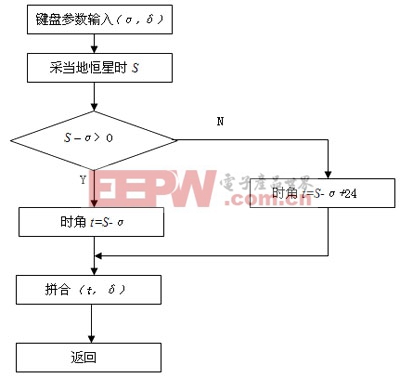
(4)标定子程序流图
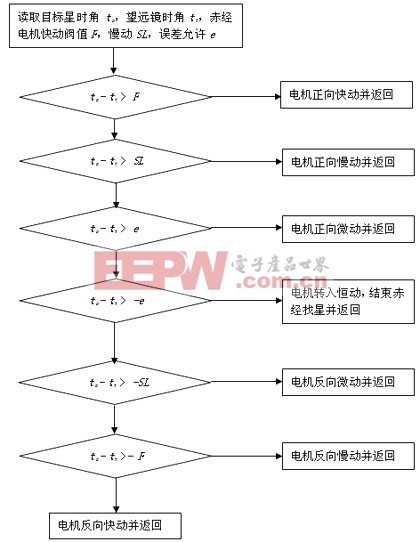
(5)自动找星子程序
首先根据输入的目标星的赤经值,取出当地的地方恒星时S,通过计算,换算成目标星的时角值to,然后读取望远镜此时的实时位置值tt,根据他们赤经时角所处的天区差异来选择不同的找星路径,具体情况可以分为以下几种:
1) 如果望远镜与目标星的时角处于同一天区(以望远镜的中柱为轴线,分为东西两大天区,人为设定),则先驱动赤纬轴,再驱动赤经轴,直到找到目标星,进入跟踪。
2) 如果望远镜与目标星的时角处于不同天区,即跨天区找星,则先驱动赤纬轴,让赤纬指向北极,再驱动赤经轴,然后再驱动赤纬轴,直到找到目标星,进入跟踪。
另外,由于我们的位置反馈信息是来自增量式圆光栅编码器,而赤纬的度数始终在(-90,90)区间,因此还需要进行一下特殊处理。
剩下的就是典型的追击问题,以赤经为例,具体流程图如下:
四 结束语
经过一个多月的实际使用观测,望远镜系统运行良好,平稳无噪音,找星定位准确,精度高,能适用于各种大中小型的望远镜。












评论