中央空调房间温度模糊控制器的设计
设计模糊控制器时需要考虑对象增益变化的补偿。在实际调节过程中,影响对象增益变化的主要原因是ΔT,即房间温度和冷却水温度的差值。当ΔT增加时,对象的增益就增大;ΔT减小时,对象增益随之减小。在控制中取误差信号为: 相当于对模糊控制器的比例作用进行修正。
相当于对模糊控制器的比例作用进行修正。
Tg――温度的给定值;
Ts――房间温度。
模糊控制器采用了解析描述控制规则可调整的模糊控制器。对于简单的模糊控制器,如果将误差E、误差变化EC及控制量u的论域取成一致,为{-3,-2,-1,0,1,2,3},则一般的模糊控制规则可以概括为:
u=-(E+EC)/2> (2)
这样的控制规则简单有效,计算机实现起来很方便。在此基础上,进一步采用了一种带有调整因子的控制规则: 
 N为论域阶数。
N为论域阶数。
在控制过程中的扰动刚开始阶段,主要是希望系统输出迅速跟随输入,减小误差,因此控制器的比例作用可以取得相对大一些;而误差较小时,则希望系统稳定,过大的比例作用会使系统出现振荡。
控制器的积分作用采用的是积分分离式的控制,在系统误差小到一定范围后才发挥作用,以减小系统振荡,提高系统稳定性。
控制变量在论域内模糊化,采用的是一般的方法,这里不再赘述。
1.4 系统仿真实验
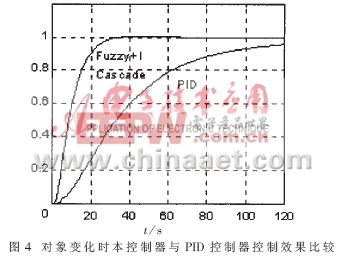
系统采用MATLAB平台下的SIMULINK进行仿真。图3给出了本控制系统和PID控制器的阶跃响应曲线。图4给出了当对象增益变为10时本控制器与PID控制器控制效果的比较。仿真说明本控制器具有较快的响应速度和较好的对象适应能力。在用水箱阀门系统作为模拟对象的实验中,也获得了相同的效果。
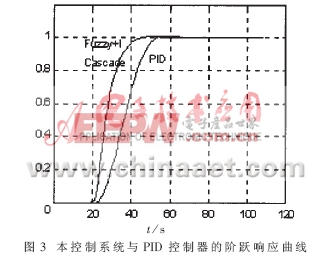
仿真曲线的超调量为5%。仿真结果说明,模糊控制器较PID控制具有响应速度快、鲁棒性好的优点。以上控制方法的说明都是以中央空调制冷状态下为例进行说明的。中央空调不仅可以在夏季制冷,冬季还可以制热。在制热情况下,系统的分析和结构是类似的。

pid控制器相关文章:pid控制器原理










评论