基于单片机智能机器人控制系统研究设计
每个继电器相当于一个单刀双掷开关,由此,两个单刀双掷开关,组成电动机正反转控制电路,实现机器人前进、后退动作。
2.2 视觉电路
在此设计中,我们仅要求机器人发现并跟踪目标,不需要识别目标。因此采用最常用的红外线反射传感器来作为机器人的视觉功能,检测机器人前方是否有目标。该功能的实现采用的是两个型号为TX05D的红外线反射传感器[4]。TX05D常用的红外反射式接近开关,它内部有一红外线发射管和一红外线接收管。发射管发出红外线,如果其正前方没有物体,那么接收管接收不到红外线反馈信号。当前方出现物体时,红外线信号经过物体被反射了回来,这时接收管接收到信号,向单片机发出高电平信号,以告知单片机其前方出现障碍物。
两个红外线传感器安装在机器人前方的两侧,在机器人工作时,两个传感器始终向外发射红外线探测信号,当其中一个传感器接收到反馈信号时,便向单片机发出高电平信号,告知单片机该方向发现目标,单片机经过判断后,控制电动机向该方向转向,以实现跟踪功能。当两个传感器都感应到目标时,机器人便向着目标直着前进,直到撞上目标。
2.3 步伐调整电路
当机器人在前进过程中,如果电机转速不一致或者在转向过程中打乱了步伐,这时便会启动步伐调整功能,该功能是利用两个光耦来完成的。在机器人腿部,装有两片通过光耦的挡片,当机器人正常行走时,挡片会交替的打开和关闭光耦。如果两个光耦的状态始终不相同。那么就说明该机器人步伐正常。当光耦状态出现相同时,说明机器人步伐错乱,需要校正步伐。这时便会随机停下一条“腿”,等另一条“腿”走在合适位置,即光耦状态相反时,再作出同步前进。电路如图3所示。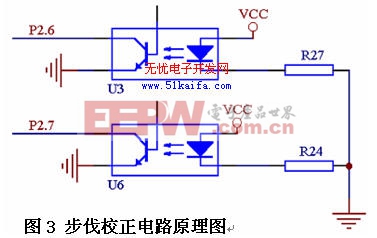
2.4显示电路
本功能主要实现了人机交互的视觉平台。本设计采用LCM1602液晶显示模块,该模块是最常用的英文显示模块,它内部含有英文字库,使用方便,价格便宜。液晶显示功能是配合语音功能共同使用的附加功能,它的作用就是可以显示当前的状态,以实现机器人的人机交互显示功能。
LCM1602是一种16字×2行的字符型液晶模块[5],主要有总线连接方式和模拟口连接方式。本设计采用的是模拟口连接方式,它和前者相比,电路更加简洁。在该电路中,P1口给显示屏输送数据,P3.0到P3.2则控制向该显示屏读写数据的状态。VL管脚过1K电阻接地,作用是限制液晶显示的色度深浅。BLA和BLK则是背光灯电源接口。电路如图4所示。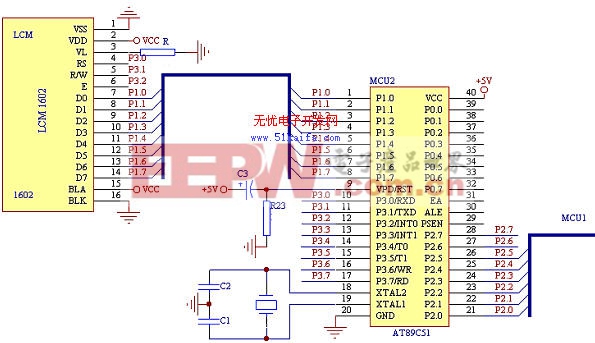
图4 显示电路原理图












评论