CAN总线远程传输可靠性的设计方法和实现
 本文引用地址:http://www.eepw.com.cn/article/173745.htm
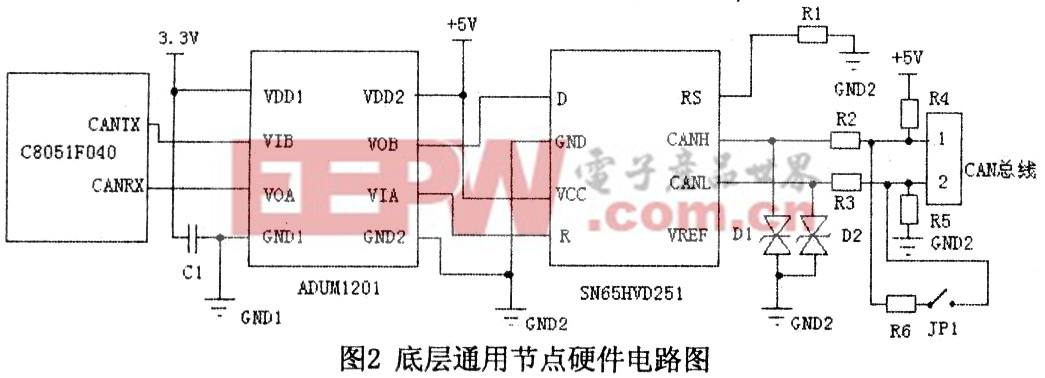
本文引用地址:http://www.eepw.com.cn/article/173745.htmCAN收发器SN65HVD251在CANH和CANL输出引脚间并联一个电阻,作为CAN总线的终端电阻,在本节点作CAN总线终端节点时,闭合跳线片JPl,使终端电阻工作。终端电阻值R6等于传输电缆的特性阻抗,一般取值120Ω在文献中有详细的讨论,解决了远近端阻抗不匹配的影响。SN65HVD25l的Rs引脚为斜率电阻输入引脚,可以改变收发器工作的方式。在CANH和CANL上各自串联电阻R2、R3限流,再通过一组上下拉电阻R4、R5,有效抑制反射波干扰,保持总线处于高阻态时,接收端收到的始终是“l”电平,这样拉高信号的幅度,减少误码率。另外在CANH年NCANL之间并联一对方向相反的瞬态二极管Dl、D2,可防雷击,以及防止其他总线上的瞬变干扰。
3 整体系统设计
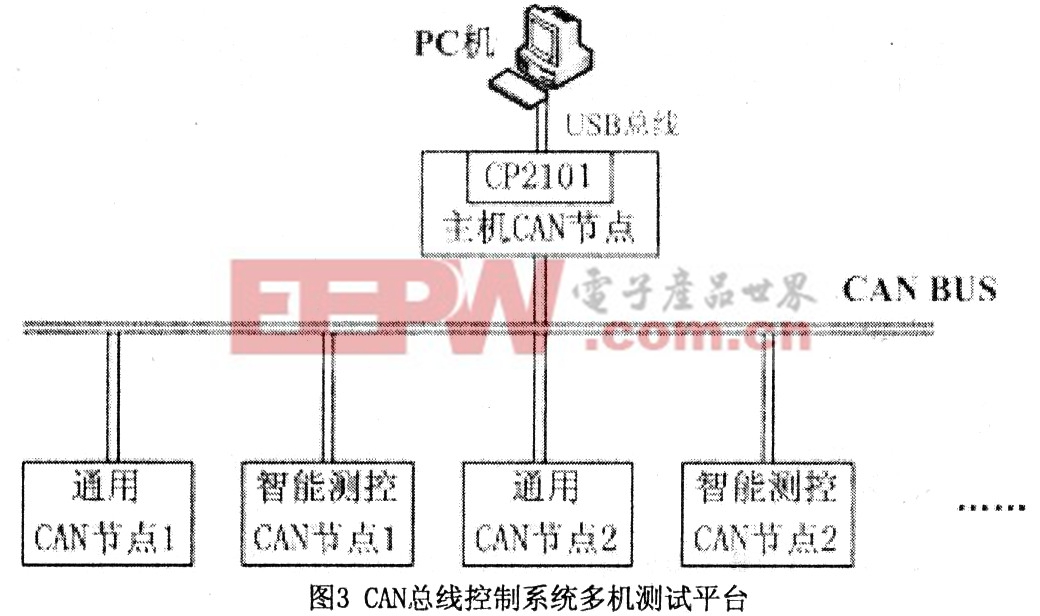
依据以上器件组建一个可靠的CAN总线远程控制系统网络平台。本系统由一个主机CAN节点通过USB接口与上位PC机相连,主节点采用总线方式与下面各个功能节点连接,如图3所示,其中主机CAN节点主要用来发送远程控制广播命令,收集所有节点传来的数据,并上传给上位机软件进行识别分类和统计,它实现了总线侦听、网络监控和上位机接口功能。而底层节点则控制系统中的底层设备,发送包含节点信息的8字节数据CAN总线报文,并侦听主机节点的网络广播指令,调整节点功能。
图3 CAN总线控制系统多机测试平台
4 实验分析
4.1 不同公里数通讯结果分析
将系统总线与模拟的1公里一5公里远程网络相连。为了更好分析CAN总线可靠性,使示波器更好的观察报文波形。将示波器CHl两端与距主节点0公里处相连,CH2两端与距主节点5公里处相连,如图4所示。这样,可以观察到相对主机CAN节点5公里通讯的近端(CHl)和远端(CH2)的通讯报文波形。
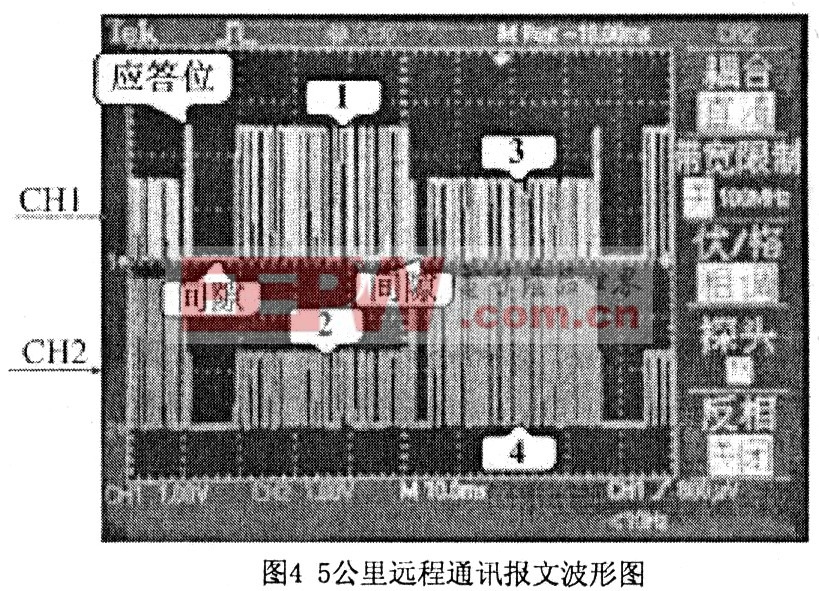
CHl测试出来的波形位于上端,CH2测试的波形位于下端。CHl端标识为1的一段波形是主节点发出的报文,2是位于CH2端底层节点接收到的报文,4是底层节点发出的数据报文,3是主机CAN节点接收到的数据,称1和2、3和4为一组报文。每帧数据的最后一位是应答位。每两帧报文之间有时间间隙,其中一段是主机CAN节点和上位PC机处理数据的时间,另外一段是底层测量节点处理数据的时间。
经过观察,近端发送的1报文经过5公里距离到远端接收到的2报文的幅值发生了衰减;同样近端收到的3报文也在远端4报文的幅值基础上发生衰减。分别测试1公里到4公里通讯的波形图,可以发现通讯距离越长,幅值衰减得越多。
在其他条件不变的情况下,分别对1公里一5公里做实验,发现远程通讯距离的变化会对报文传输速率有影响但很小,将得出的数据制表如表1。












评论