基于PIC18F2580的CAN总线超声波测距智能节点设计
CANH和CANL与地之间并联了两个30 pF的电容,可以过滤掉总线上的高频干扰和一定的电磁辐射。两根CAN总线接人端与地之间分别反接了一个保护二极管。当CAN总线有较高的负电压时,通过二极管的续流可起到一定的过压保护作用。总线两端接的120Ω电阻起匹配总线阻抗的作用,忽略掉它会使数据通信的抗干扰性能及可靠性大大降低甚至无法通信。
4 超声波智能节点控制系统的软件编写
软件的编写工作主要有两个部分:超声波测距部分和CAN总线的通信部分。
4.1 超声波测距部分的软件设计
当超声波接收器接收到回波时,硬件电路产生脉冲电平触发PIC18F2580的外部中断0口。软件编写的主要思想是,在中断服务程序中由寄存器预先设定一个数值,这个数值是机器人避障的最短距离。从超声波发射头发射方波开始,到超声波接收头接收到回波为止,把这段时间换算成为距离,与上述最短距离相比较。如大于最短距离,则不作处理,跳出中断服务程序;如等于或小于最短距离,则执行相应动作。图5是这部分程序的流程。本文引用地址:http://www.eepw.com.cn/article/173729.htm
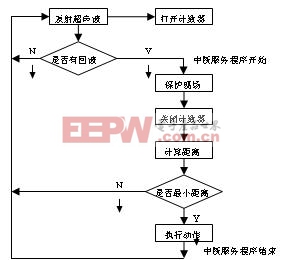
图5 超声波测距软件流程图
4.2 CAN总线通信部分的软件编写
这部分软件编写主要由以下几部分组成:初始化、接收处理、发送处理、中断处理及错误处理函数。由于系统中任意节点在任意时刻均可主动与其它节点通信,故各个节点通信程序大致相同。具体程序的编写可参考PIC18F2580的用户手册。
5 结束语
本文论述了以CAN总线扩展多路超声波传感器的基本思想,介绍了一种以Microchip公司PIC18F2580作为超声波传感器控制核心及CAN总线控制器。以TJAl040作为CAN总线收发器的CAN总线智能超声波测距系统。将多路超声波传感器的扩展转移到智能节点部分上完成,简化了移动机器人系统控制核心的工作;采取了比较简单的硬件设计,主要是将超声波传感器的控制核心和CAN总线控制器集中到一起,采用PIC18F2580一个器件完成两种芯片的工作,节省硬件。另外,CAN总线的扩展也会令后续的移动机器人系统的进一步开发变得更为灵活。












评论