基于ATmega128单片机的压电式贾卡控制系统设计
1.3 硬件各部分设计
1.3.1 MCU控制中心
本经编机贾卡控制系统采用美国ATMEL公司资源丰富的ATmega128产品作为主控芯片进行设计。ATmega128为基于AVR RISC结构的8位低功耗CMOS微处理器,具有快速、灵活、集成度高,加密性强和易实现等诸多优点。ATmega128具有128 KB的系统内可编程FLASH、4 KB的E2PROM、4 KB的SRAM、53个通用I/O口线、32个通用工作寄存器、实时时钟RTC、4个灵活的具有比较模式和PWM功能的定时器/计数器(T/C)、2个USART、面向字节的两线接口TWI、8通道10位ADC、具有片内振荡器的可编程看门狗定时器、SPI串行端口、与IEEE 1149.1规范兼容的JTAG测试接口,以及6种可以通过软件选择的省电模式。由于其先进的指令集以及单周期指令执行时间,ATmega128的数据吞吐率高1 MIPS/MHz,比普通的复杂指令集微处理器高10倍,从而可以缓减系统在功耗和处理速度之间的矛盾。
1.3.2 RS 485通信
在实际应用中采用一台主机控制多台从机。根据设备的基本要求,从机与主机间的通讯速度不需要太高,一般采用9 600 b/s或14 400 b/s即可。所以本系统通讯总线采用半双工RS 485总线即可达到要求,且造价低廉,稳定性好。用MAX485芯片在控制信号下可以完成与上位机的通讯,实现数据的传输,主要是接收上位机传来的选针花型数据以及发过来的控制命令。
1.3.3 掉电存储
图2中,掉电存储部分采用FM24C512。它带有2线工业标准串行接口的512 KB非易失性FRAM,且与工业标准24C512的E2PROM的引脚兼容,极易进行容量扩展。为满足系统需要,本设计采用了两片FM24C512,组成了1 MB的存储空间。该存储器以高达1 MHz的总线速度执行读操作和无须等待的写入操作,擦写次数超过100亿次,避免了一般E2PROM存储器需要很长的擦写延迟时间和轮询软件,擦写次数并少于100万次的弊端。其工作电压是5 V,读写频率在100 kHz时电流消耗为250μA,具有极低的功耗。可在-40~+85℃的工业温度范围内工作,同时提供45年的数据保留能力,信息保存可靠。利用AT-mega128的两线接口TWI(I2C)对FM24C512进行操作,简单方便,满足系统要求。正是由于以上原因,系统设计舍弃了单片机自身所具有的E2PROM而采用了FM24C512作为掉电存储器。
1.3.4 信号传输
系统的控制过程是一个闭环控制,信号传输过程如图2中所示,MCU通过花型数据来驱动提花机的贾卡动作,同时提花机将贾卡的当前状态反馈给MCU,MCU根据实时的贾卡状态修正或准备新的花型数据并驱动贾卡动作,从而形成回路控制。
控制系统一次性传输的数据量较大,每台贾卡经编机上一般有几千把导纱针同时动作,单片机控制导纱针的每一个动作都需要向外输出几千位的控制信号,使用并行输出,受单片机端口数限制必定行不通。使用串行转并行输出则可以很好地解决问题,所以系统采取的是单片机串行输出花型数据到贾卡的驱动电路,驱动电路将串行数据转化成并行数据执行动作的方式。虽然串行比并行传输的速度慢,但根据实际需要在规定的时间内传输完几千位的数据还是可以做到的。因此,信号传输过程对速度和抗干扰能力的要求较高,同时系统中贾卡驱动电路设计至关重要。
为防止电源等对信号的干扰,对输出的花型数据信号进行光电隔离,经隔离后的信号通过信号长线驱动器MC3487转换成RS 422信号,将TTL逻辑电平变为电位信号来实现信息传送。同理,MCU接收的反馈贾卡状态信号也需要经过长线驱动器MC3487和长线驱动接收器MC3486的处理后经过光隔进入单片机。这样的设计不仅可以增加系统的抗干扰能力,同时可以支持较高的传输速率和较长的传输距离。
1.3.5 光电隔离
为满足系统高速、低功耗、可靠的信号传输要求,光隔部分采用6N137光耦合器。它是一款用于单通道的高速光耦合器,其内部有一个850 nm波长A1GaAsLED和一个集成检测器组成,其检测器由一个光敏二极管、高增益线性运放及一个肖特基箝位的集电极开路的三极管组成。具有温度、电流和电压补偿功能,高的输入输出隔离,LSTTL/TTL兼容,高速(典型为10 MBd),5 mA的极小输入电流。
1.3.6 贾卡驱动
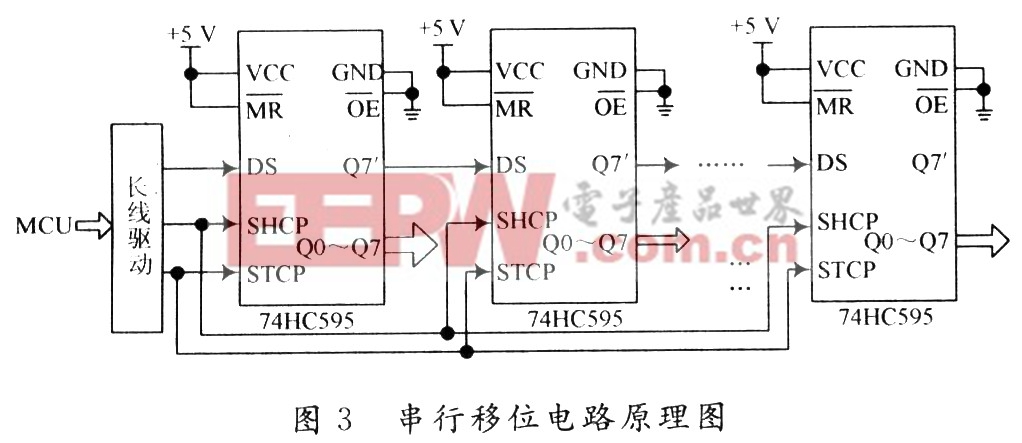
本设计采用硅结构的CMOS器件74HC595作为串行移位输出,其兼容低电压TTL电路,遵守JEDEC标准。8位串行输入、8位串行或并行输出,具有8位移位寄存器和一个存储器,三态输出功能。移位寄存器和存储器是分别的时钟。输出寄存器可以直接清除,具有1OO MHz的移位频率,并行输出,总线驱动。数据在SHCP上升沿进入移位寄存器后,在STCP上升沿输出到并行口进行驱动。串行移位输出电路原理如图3所示。 本文引用地址:http://www.eepw.com.cn/article/173571.htm
根据贾卡导纱针的工作原理,驱动电路要根据花型数据给压电陶瓷加正或负60 V直流电。驱动电路如图4所示,主要由74HC541为八缓冲器/驱动器、2个2N5551型三极管、2个2N5401等组成。
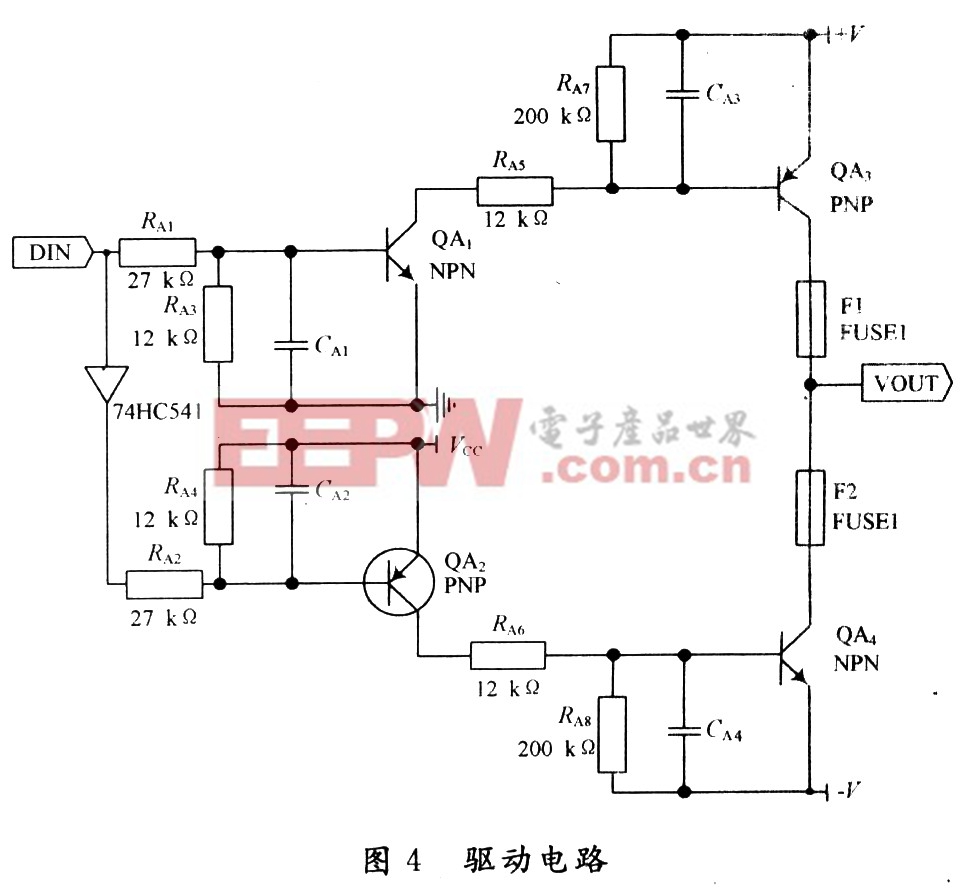
压电陶瓷驱动电路的工作原理为:由控制系统输出的脉冲信号DIN,一路输入到第一组由QA1和QA3组成的正电源开关电路,另外一路经过74HC541缓冲输入到第二组由QA2和QA4组成的负电源开关电路,这两组开关电路由DIN统一控制。当DIN为高时,第一组开关电路导通,第二组关断,正电压+V输出加到压电陶瓷端(VOUT);当DIN为低时,第二组开关电路导通,第一组关断,负电压-V输出加到电陶瓷端(VOUT)。这样通过系统输出的脉冲信号不断变化即能控制压电陶瓷导纱针的左右摆动,将电能转换成机械能,实现提花选针。













评论