基于单片机的倒车防撞预警系统设计和实现
3.1 主程序
本系统有四路测距通道,采用分时工作,按后左一后左中一后右中一后右顺序循环测距。每一路发射超声波后的等待外部中断时间应大于超声波在最大有效探测距离内往返时间。所以按最大有效探测距离可以估算出最短的循环间隔时间。因为超声波在空气中传播能量会不断衰减,所以超声波测距存在最大有效探测距离。这最大有效探测距离与多种因数有关:
与超声波传感器性能的好坏、与驱动超声波传感器的脉冲电压幅值(功率)的大小、障碍物大小和形状、障碍物吸波特性以及反射波与入射波之间的夹角、与超声波放大和整形电路的灵敏度等有关。设定最大有效探测距离为8 m(收发一体封闭型超声波传感器比较难达到,实际上也没有必要探测很远的障碍物,只是设计留有裕量。由于显示位数有限,也必须对最大探测距离做限制),则循环工作的间隔时间Tm=2S/C=2×8/346A46 ms,加上避免接收超声波传感器余振的延时和程序执行时间,留足裕量,设定Tm△56 ms。
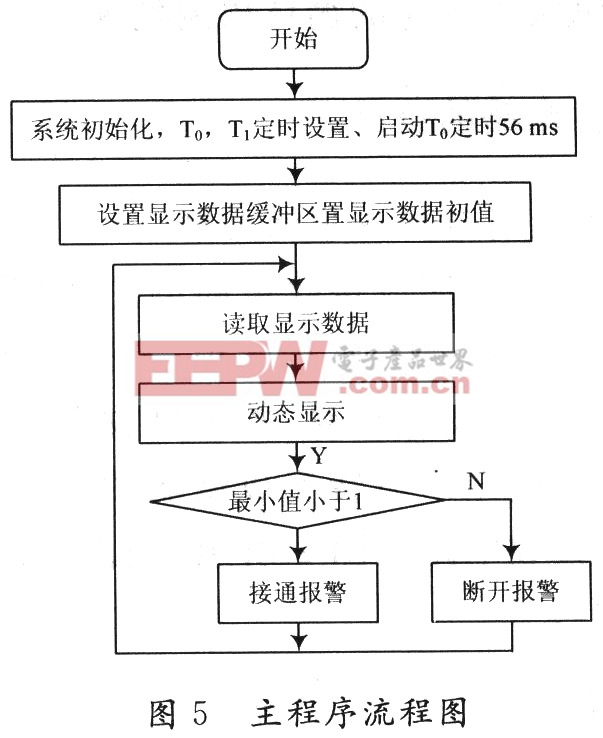
主程序流程图如图5所示。首先是对系统初始化。端口p1.0、P3.3置0;设置堆栈,中断允许总控制位EA允许中断(EA=1);允许外部中断0中断(EX0=1),采用边沿触发方式(IT0=1);设置定时器T0允许中断(ET0=1),以16位工作方式定时约56 ms;设置定时器T1以16位工作方式定时/计数,计数初值0000H,然后启动T0定时。设置显示数据初值为三位BCD码999(cm),对应字形段码显示“---”。四路探测处理完毕后,将四组数据中的最小值送入显示缓冲区,通过LED数码管显示。同时该值与设定的100 cm值比较,若四组数据中的最小值小于100 cm,P3.7端口置0,Q2三极管导通,有源蜂鸣器得电发出报警声。本文引用地址:http://www.eepw.com.cn/article/173510.htm
由于单片机采用12 MHz的晶振,1个机器周期为1μs,所以计数器每计一个数就是1μs,定时器T1工作模式设置为16位定时/计数器模式,则其最大定时65.536 ms。由于定时器T0每56 ms产生中断,执行T0中断服务程序时停止T1计时,所以T1计时不会产生溢出中断。一轮四路探测处理完毕所用时间大约是56 ms×4=224 ms,用时很短,而倒车速度又比较慢,所以可以做到实时动态显示。
3.2 T0中断服务程序
T0中断服务程序流程图如图6所示。每隔56 ms分别按后左→后左中→后右中→后右顺序选通下一路超声波发射与回波接收电路,调用超声波发生子程序,送出16个40 kHz的超声波脉冲电压,定时器T1开始计时,定时器T0开始定时56 ms,使每路工作56 ms。













评论