基于SPMC75F2413A单片机的步进电机加减速控制
步进电机易于与数字电路接口,但一般数字电路的信号能量远远不足以驱动电机。因此,必须有一个与之匹配的驱动器来驱动步进电机。驱动器通过给电机绕组提供特定的激磁电流,告诉电机需要运行多少微步。步进电机运行在整步模式时,因为刚好与电机的机械设计特点相吻合。此时定转子齿正好完全对齐,且绕组中流过的电流最大,步距角也最大。随着细分数的增加,步矩角相应减小。
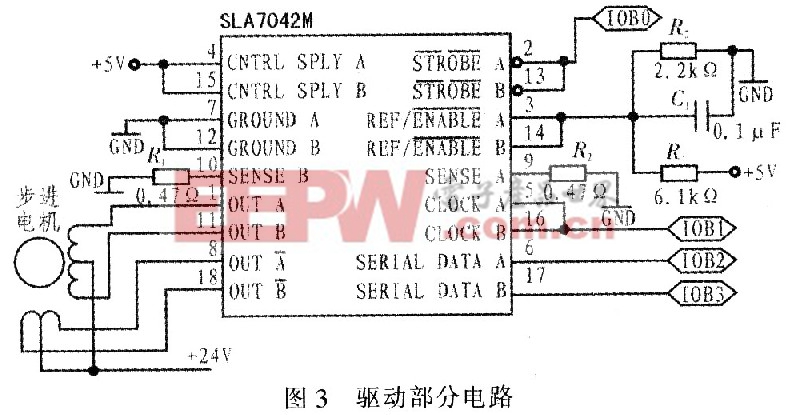
该系统采用Allergo公司生产的驱动器SLA7042M,其本质上是利用数字量输入控制输出电流,其内部的2个4 bit的移位寄存器分别接收由SerialData引脚输入的电机相位信息和激磁电流比例数据。该4 bit的移位寄存器的第l位先载入相位信息,接着依次串行载入激磁电流比例数据的最低位,次低位,最后载入最高位。驱动部分电路如图3所示。本文引用地址:http://www.eepw.com.cn/article/173305.htm
3 系统软件设计
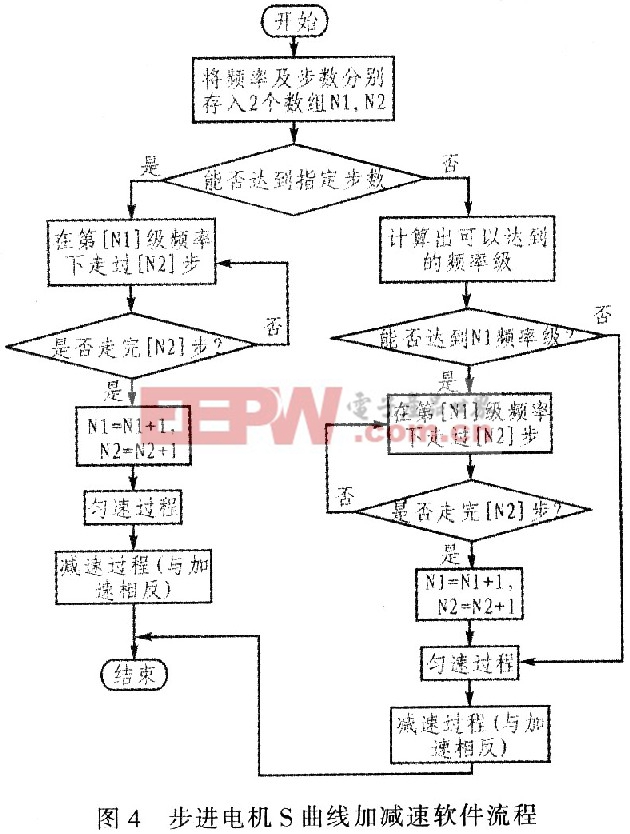
通过式(1)可计算出每个频率档的频率以及在该档内步进电机所走的步数,将这40个档的频率以及各个档内所走的步数分别存入2个数组变量。该系统软件程序首先判断步进电机是否能达到最大速度。当规定步进电机转动的步数少时,步进电机不能达到最大速度,速度就要开始下降。这时首先应求出升速所能达到的步数和频率,及降速所能达到的步数和频率。而减速过程和加速过程正好相反,即就是将2个数组中存入的数据,按相反顺序输出。图4为步进电机S曲线加减速软件流程。
4 结束语
使用凌阳SPMC75F2413A单片机,采用S曲线增减速的方法有效控制了步进电机启动和停止过程中容易产生的失步及过冲现象。该控制方法有效、实用,已在数控切削系统中得到验证,结果稳定可行。












评论