基于AD2S82A的天线方位角的数字变换的设计
系统的工作过程:从与雷达天线同步的旋转变压器来的115V、400 Hz激磁信号输入到由R1、R2、R2、R4及运放A1组成的衰减缓冲电路后。产生AD2S82A所需的2V(有效值)参考信号。同样,旋转变压器输出的sin和cos信号也经过相似的衰减缓冲电路,产生AD2S82A所需的2V(有效值)sin及cos信号。它们被连接到AD2S82A相应的输入端,经AD2S82A变换后,在其数据输出端产生与雷达天线方位角对应的二进制数字信号。
由单片机读取方位角的二进制数字信号,并进行相应的转换处理,最后向上位机传送雷达天线的方位角度值。衰减缓冲电路中电阻值的选取,耍根据不同型号的旋转变压器选取不同的数值。每个运放输入端的齐纳二极管,是为了保护运放不被高压击毁。对于使用同步机的其他型号雷达,衰减缓冲电路应设计成斯考特电路或采用斯考特输入变压器。关于斯考特电路这里不作讨论。
3 外围元件的连接及选择
为了实现旋转角的数字变换,AD2S82A还需要一些外围辅助电路。这些电路的工作特性除了能够影响变换电路的整体动态特性外,甚至还能影响到电路的变换精度。因此,外围元件的选择显得格外重要。AD2S82A的外围电路连接如图5所示。
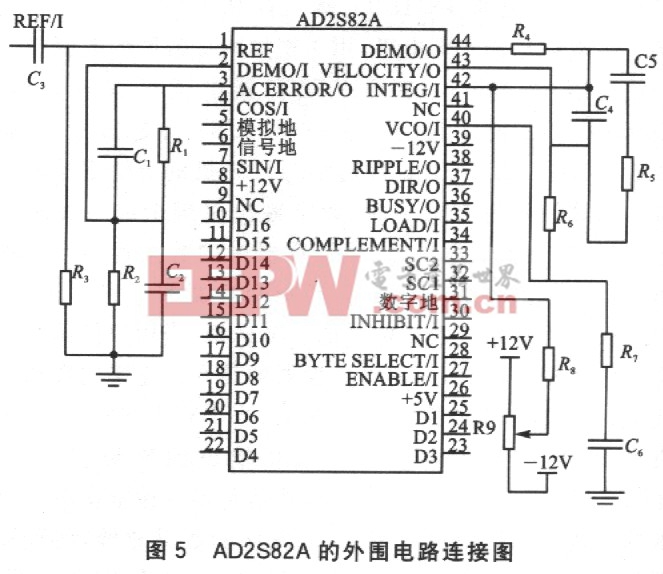
①Rl、C1、R2、C2构成HF滤波器。其作用是去除直流偏移并减小输入信号中噪声信号对相敏解调及输出数据的影响。它们的选择可根据如下公式计算:
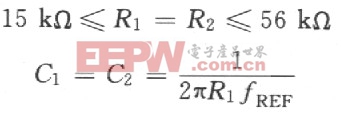
fREF为参考信号的频率,单位为Hz。
②R4为DC误差信号的增益调整电阻。在选择好Rl和C2之后,R4应根据如下公式计算:
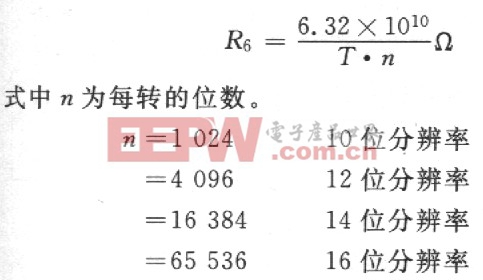
 ③R6是决定变换器电路最大跟踪速度的电阻。根据用户对最大跟踪速度的要求,由下式计算R6的值(注意,最大跟踪速度为每秒T转,不能大于参考信号频率的1/16):
③R6是决定变换器电路最大跟踪速度的电阻。根据用户对最大跟踪速度的要求,由下式计算R6的值(注意,最大跟踪速度为每秒T转,不能大于参考信号频率的1/16):
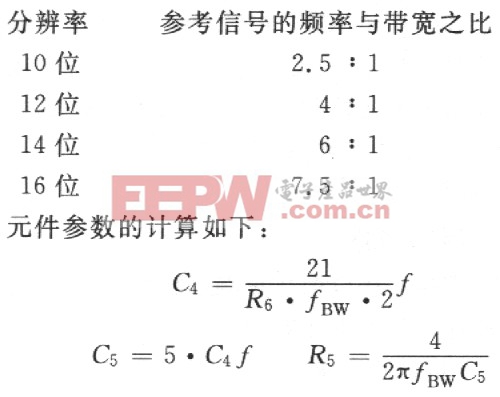
④C4、C5和R5构成闭环带宽(fBW)选择电路。对于400 Hz的参考信号,典型的带宽取值为100 Hz;对于5000 Hz的参考信号,典型的带宽取值为500~1000 Hz。要求该电路能确保参考信号的频率与带宽之比大于下列数值的要求:
















评论