一种基于单片机智能控制的云台设计
初始化主要是对单片机内部变量的赋值及输入端、输出端的清零。在无人闯入传感器检测区域时,单片机一直处于扫描输入信号状态,传感器输入到单片机的信号一直为低,当有人进入任意传感器检测区域时,相应传感器输出为高电平,单片机开始从P0口的低位到P1口高位逐位进行信号检测,当检测到某位为高时,立即保留该值并与上一次保留的值或初始位置值进行计算,得出现在人所在位置与上一位置的位置差。如果等于0则继续扫描输入信号;如果大于0则依据差值调用相应的函数控制步进电机正转一定的角度;如果小于0则依据差值的绝对值调用相应的函数控制步进电机反转一定的角度,从而带动摄像头转动。始终使入侵者当前位置为摄像头的视角范围中心区域,从而实现智能全方位监控。水平和竖直步进电机软件控制流程相同,只是对采集信号的处理运算方式和电机转动角度不同。
4 功能测试
4.1 测试结果
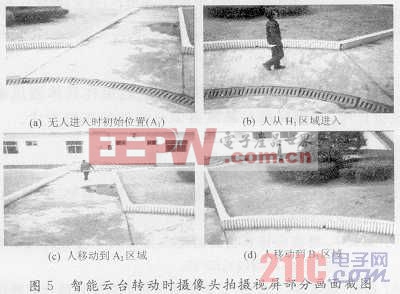
在软件调试成功后,进行了实物制作,经功能测试验证达到设计要求。测试中监测了以云台为中心八个方向,每个方向为45°的扇形区域,每个区域设两个点,共16个点的信息,验证了设计功能。图5所示四幅图像为有人进入时,单片机自动控制云台转动时摄像头(电脑摄像头模拟)所拍摄的视屏部分画面截图。测试中以A1A2,B1B2,C1C2,D1D2,E1E2,F1F2,G1G2,H1H2分别代表八个方向,下标1表示距离中心最近的一圈探测点(如A1~H1),下标2表示离中心稍远的一圈探测点(如A2~H2),16个点构成以云台为圆心的极坐标系,在这16个位置中进行测试,设摄像头初始位置为A1区域。本文引用地址:http://www.eepw.com.cn/article/172707.htm
4.2 测试结果分析
从测试过程可以看出此云台能实现智能控制监控摄像,将云台的转动过程与人闯入的位置结合分析得出一些测试数据,表明该云台能实现设计的功能,转动精确,表1所示为测试中的部分数据分析,其中一环表示下标为1,离云台最近的探测点;二环表示下标为2,离云台稍远的探测点,水平代表水平方向,竖直代表上下方向。

无人进入传感器监测区域时,云台上的摄像头停留在初始位置不动,当人从以云台为中心的8个方向中任意方向进入传感器探测区域时,电机能带动摄像头实现水平左右,竖直上下转动,始终使人处在摄像头视角范围的中心区域,实现全方位智能追踪监控摄像。
经过多次测试和数据分析表明,该智能控制云台上电后能按设计要求进入正常的工作状态且准确度高,证实了方案的可行性和可靠性。
5 结语
设计主要以单片机为控制核心,结合人体红外传感器组成的多点信号采集电路和L298N驱动电路去控制云台,对进入设防区域内移动的入侵者进行全方位自动追踪摄像。该云台转动角度精度高,带负载能力强,运行稳定,且无人时不工作,很节能。与现在市面上的高速球形和远程控制云台相比,该云台具有智能方便,运行省电节能,生产成本低,易于维护等优点。因此,利用该方法设计的云台在经过一定的加工处理后在智能控制、监控等领域有很强的实用价值和现实意义。













评论