基于STC12C5A60S2的教育机器人的设计与实现
3.3 红外光电传感器寻迹阵列模块
红外光电检测电路工作原理是:红外线射到路面并反射,利用红外线在黑线和白线对光的反射系数不同的特点一白色反光线,黑色吸收光线,电路设计一个发射红外光和一个红外光敏二极管,当检测到黑线时,检测电路向单片机发出一个高电平信号。当检测到白色时,检测电路向单片机发出一个低电平信号。
由7组红外光电检测电路排成一排构成一个红外光电传感器阵列模块,安置在机器人的车头位置。在对黑线循迹的过程中,红外光电传感器阵列模块可以求得机器人对黑线轨迹位移偏移量。单片机检测到红外光电传感器阵列模块的信号与机器人的位移偏移量如表1所示。

当机器人行驶的状态不一样时,7组传感器输出的值也对应不同,从表中可以得到机器人在巡航过程中机器人所处位置与黑色轨迹的偏移量。
3.4 车速检测模块
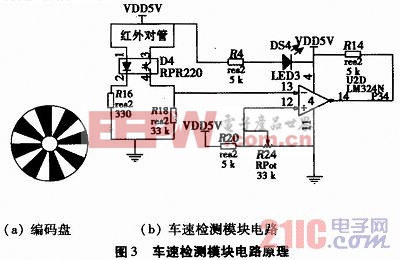
教育机器人系统通过车速检测模块来读取当前车速。采用的方法是在后左右轮上分别粘贴一个均匀分布有黑白条纹的编码盘(见图3(a)),利用图3(b)的检测电路来对编码盘上的黑白条纹进行检测。当车轮转动时,红外接收管接收到的反射光强弱高低变化就会产生与车轮转速相对应的脉冲信号,将该脉冲信号进行放大整形后输入单片机的引脚P3.4和P3.5,记录单位时间内所得到的脉冲数,就能够表示出当前车左右轮子的速度,同时通过累加可以计算出小车所行走的路程。
3.5 其他电路
数码管显示电路主要是显示当前机器人的行走速度。采用LED数码管动态显示,段码用PNP三极管驱动。系统显示的距离范围在10米之内,选用4位LED共阳数码管,通过单片机编程实现动态扫描显示。显示字符由单片机P0口送出,P1.6、P1.7、P3.0和P3.1分别控制每一位数码管的动态显示。
报警电路通过单片机P3.7控制蜂鸣器来完成。P3.7输出低电平时,蜂鸣器报警;P3.7输出高电平,蜂鸣器不报警。单片机的外部中断输入口P3.2和P3.3与地之间分别接入轻触按钮作为系统的启动和停止开关,作为按键输入电路。

pid控制相关文章:pid控制原理
pid控制器相关文章:pid控制器原理
蜂鸣器相关文章:蜂鸣器原理 温湿度控制器相关文章:温湿度控制器原理









评论