感应式循迹小车的设计与实现
3 循迹小车的程序设计
3. 1 总体设计思路
在循迹小车运行过程中,不断读取P3口的状态值,取出高4位,将结果存入累加器A中,然后用查表的方法,取出对应的组合参数表值,在读出的表值中,高4位为控制电动机运行的参数,低4位为电机运行的延时参数,把高4位和低4位数从字节中分离出来,将高4位数送入P2口对循迹小车运动状态进行控制,将低4位值赋予延时子程序的R0,延时时间为R0×T(ms),T是单位时间,需根据循迹小车的速度性能确定,用以控制各运行状态的运行时间。另外,在循迹小车寻迹过程中,常会出现循迹小车出轨的情况,一旦循迹小车脱离寻迹轨道,往往意味着寻迹失败,因此需在程序中增加挽救措施,让循迹小车在发现自已脱轨后,立即后退,回到轨道线继续运行。根据以上设计思路,循迹小车的控制流程图如图5所示。本文引用地址:http://www.eepw.com.cn/article/172195.htm

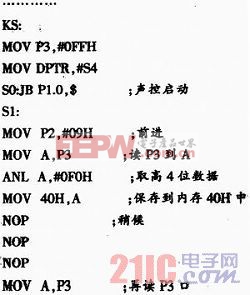
3.2 主要汇编程序实现

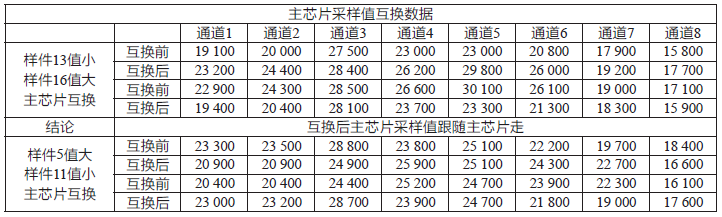
4 结论
为提高传统循迹小车的运行可靠性,文章提出感应式循迹小车的设计方法,且详细地阐述了该设计的主娄组成:循迹小车的硬件及电路、循迹小车的循迹控制和单片机的程序实现。
按照本文所提出的新方法,作者成功地设计和制作了感应式循迹小车的样品,样品实际测试结果表明:基于新方法设计的小车运行平稳,在长时间工作中没有出现脱轨现象,循迹小车的运行与环境光的强弱没有关系,小车的整体性能较好。

倍压整流电路相关文章:倍压整流电路原理













评论