低成本8位单片机控制的光电寻迹智能车
2.1 最小系统及主板
系统采用的常规使用的最小系统板,以MC9S08AC16为核心的单片机系统的最小系统主要包括以下几个部分:时钟电路(外接的8 MHz的石英晶振)、电源电路(提供5 V直流电源)、复位电路、BDM接口(通过BDM头向单片机下载和调试程序)。
主板上有组成本系统的主要电路,具体包括:
电源稳压电路 7.2 V的电池电源将会通过3个集成稳压电路处理成两个5 V、一个约5~7.2 V的可调直流输出,其中一个5 V直流电源供单片机和相关外设工作,另外一个5V直流单独供激光传感器工作,可调直流输出供舵机工作,采用这种电源设计方式,可以提供所需不同大小的电源,同时在舵机、激光传感器工作时不会影响单片机的工作电源。
接口电路 包括舵机接口、电机驱动接口、电源接口、调试用人机界面电路接口、单片机最小系统插座。
电机驱动板作为一个独立的单元制作的直流电机“H”型双极性驱动电路。
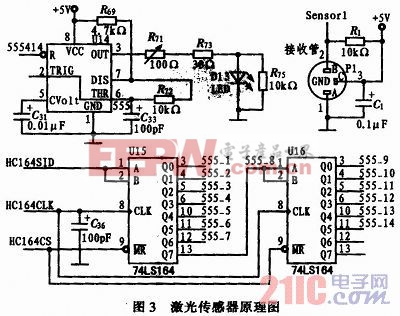
2.2 传感器模块
采用14个发射,7个接收,两个发射一个接收为一组一字排开。每次选中不相邻两个发射管发射,由两个接收譬分别接受。AC16单片机的IO端口进行控制,由74LD164驱动选择要发射的传感器,由一个555芯片发出100 kHz的频率震荡波,激光管发光。接受部分有一个相匹配的100 kHz的接收管接收返回的光,7路接收管的接收信号直接进单片机。传感器原理如图3所示。本文引用地址:http://www.eepw.com.cn/article/172183.htm
3 软件设计
3.1 软件设计概要
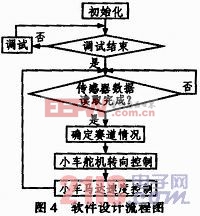
系统的主函数将执行图4所示流程图对应的程序。调试程序可以完成的功能有:检验传感器故障、调试速度控制参数、舵机中点设置、舵机转角参数控制等。传感器数据的读取特指激光传感器的读取,在定时器程序中,每5 ms开始新的一轮激光扫描,每125μs更换1组激光发射管,每组发射两个不相邻的激光信号,所有激光发射5遍之后,3次以上检测到赛道轨迹信号才确认有效,此时才会设置传感器数据读取完成标志,所以系统每5 ms进入后续程序执行。小车舵机转向控制、速度控制稍后详细论述。对于小车马达速度控制则为闭环控制,采用bang-bang控制与P算法控制相结合,小车的速度读取采用了输入捕捉功能完成,车子运动时,车轮转动,每转过1/5圈,红外传感器就会输出一个完整的脉冲周期,通过读取红外传感器的输出脉冲频率确定小车的速度。












评论