一种新型电子机械锁的设计
2.2 指纹识别模块的通信协议
指纹识别模块作为从设备,通过串口,由主芯片ATmega162发送相关命令对其进行控制。
命令接口:19200b/s 1起始位1停止位(无校验位)。
主芯片发送的命令及指纹模块的应答数据长度为8 B,数据格式如下:
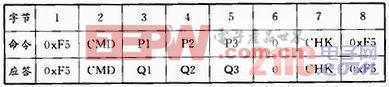
CMD:命令/应答类型;P1.P2,P3:命令参数;Q1,Q2,Q3:应答参数;CHK:校验和,为第2字节到第6字节的异或值;Q3用于返回操作的有效性信息,表示操作是否成功,数据是否存在,采集指纹超时等。
3 程序设计
系统从睡眠状态启动时,首先进行系统初始化,然后进入正常工作状态,如图6所示。
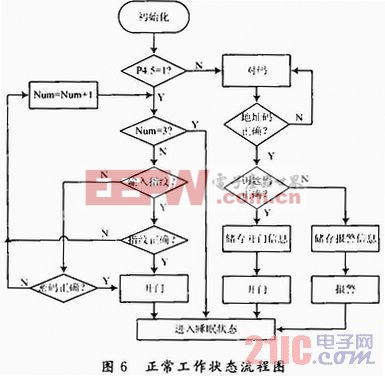
转动机械锁上的金属转接口会改变单片机ATmega162的P4.5的状态。开启金属转接口,单片机ATmega162处理来自机械锁发送的信息;关闭金属转接口,单片机ATmega162处理来自电子锁上指纹识别模块或键盘的信息。
系统还开启了两个中断:设置中断和匹配中断。匹配中断就是电子锁和指定的机械锁进行匹配,只接收来自指定的机械锁发出的信息;设置中断就是指纹和密码的管理。
3.1 匹配中断
匹配中断是链接多特征电子机械锁两个部分的前提,初次安装电子机械锁必须进行匹配中断。在开启该中断前,必须没置好正确钥匙。匹配中断为外部中断,通过按下控制系统模块上的匹配键,进入匹配中断如图7所示。

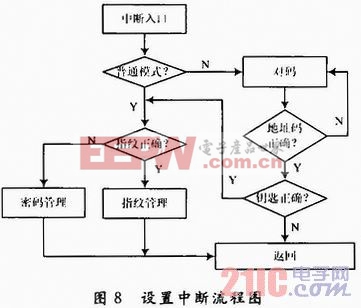
3.2 设置中断
设置中断分为两种模式:普通模式和特殊模式。特殊模式就是利用正确钥匙管理指纹和密码,如图8所示。














评论