基于专用控制芯片的步进电机运动控制系统设计
2.2 专用控制芯片间的硬件连接
专用控制芯片TMC262和TMC429的连接简图如图4所示。本文引用地址:http://www.eepw.com.cn/article/171200.htm
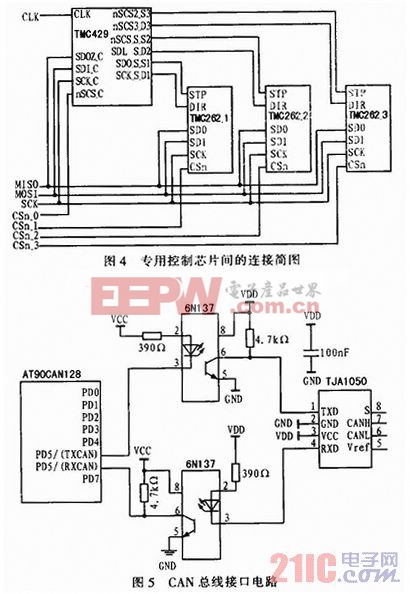
上图为TMC429-L1(QFN32封装)与TMC262的连接简图,TMC429与TMC262的通信方式有SPI模式和step/dir模式,本系统选用后者。CSN_0用于片选TMC429的SPI微控制接口,CSN_1、CSN_2和CSN_3分别用于片选3个TMC262以完成对TMC262的配置。
2.3 CAN总线通讯接口电路设计
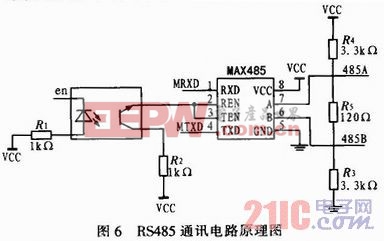
系统CAN总线的硬件电路如图5所示。
CAN接口电路主要由3部分组成:单片机AT90CAN128、高速光耦合器6N137和高速CAN总线收发器。其中AT90CAN128主要负责内部CAN控制器的初始化、实现数据的接收和发送等通信任务;6N137起到控制器与工业现场相隔离的目的,可以提高系统的抗干扰能力;TJA1050是控制器区域网络(CAN)协议控制器和物理总线之间的接口,可以为CAN控制器提供差动接收性能。
2.4 RS485总线通讯接口电路设计
系统RS485总线的硬件电路如图6所示。
由于RS-485与TTL电平不兼容,因此两者之间需要有电平转换。目前完成此功能的芯片比较多,本系统中采用MAXIM公司生产的MAX485。该芯片内有接收器与发送驱动器,控制简单,适用于半双工通讯。为了提高通讯接口的抗干扰能力,在MAX485与单片机输出端之间接入光电耦合器;同时在A端和B端之间增加了匹配电阻,以吸收总线上的反射信号,保证正常传输信号时无毛刺。












评论