基于802.11b与安卓手机操控机器鱼的研究
3 Wi—Fi模块
Wi—Fi无线网络包括两种类型的拓扑形式,基础网(Infra)和自组网(Adhoc)。要说明无线网络的拓扑形式,需要首先了解两个基本概念:
AP:也就是无线接入点,是一个无线网络的创建者,是网络的中心节点。我们一般家庭或办公室使用的无线路由器就一个AP。
STA:即站点,每一个连接到无线网络中的终端(如笔记本电脑、PDA及其它可以联网的用户设备)都可称之为一个站点。
Infra也称为基础网,是由AP创建,众多STA加入所组成的无线网络。这种类型的网络的特点是AP是整个网络的中心,网络中所有的通信都通过AP来转发完成:Adhoc也称为自组网,是仅由两个及两个以上STA自己组成,网络中不存在AP,这种类型的网络是一种松散的结构,网络中所有的STA都可以直接通信。
基于自组网中所有的STA都可以直接通信的特点,本文采用了自组网的形式建立手机与Uart-wifi模块之间的通信。手机和所有装有Uart—wifi模块的机器鱼都各自是一个STA,当手机发出控制命令后,每一条机器鱼(即每一个STA)都会接收到这个控制命令,从而做出相应的动作实现对多鱼的控制。
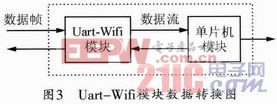
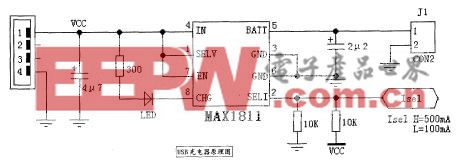
由于数据在网络上是以数据帧的形式传输的,而在串口中是以字节流的形式传输的,我们要想把手机传送的网络数据通过串口传送给单片机就要先进行数据类型的转换。所以我们采用了嵌入式Uart-Wifi模块。Uart-wifi模块是基与Uart接口的符合Wi—Fi无线网络标准的嵌入式模块,内置无线网络协议IEEE802.11协议栈以及TCP/IP协议栈,能够实现用户串口数据到无线网络之间的转换。通过Uart-Wifi模块,传统的串口设备也能轻松接入无线网络。当Uart-Wifi模块接收到网络上传输过来的数据帧时它会将这些数据从帧格式转换成流格式,这是比较容易的,也是大多数普通Wi—Fi模块都能够实现的,但当模块从串口接收单片机返回的数据即接收到流格式数据要将其转换成帧格式发送出去时就比较困难了,它需要一定的规则进行约束。而Uart-Wifi模块使用“自动组帧长度”和“自动组帧周期”来进行约束,能够轻易的将数据从流的形式转换成帧的形式。因此应用Uart-wifi模块作为中间模块进行手机和单片机间的通信能够轻易地解决数据类型转换难的问题(见图3)。本文引用地址:http://www.eepw.com.cn/article/170998.htm
4 单片机模块
本项目采用MSP430F149单片机作为鱼体控制芯片,它是一种高性能、低功耗的16位控制器,广泛应用于通讯控制设备中。作为控制芯片,MSP430F149单片机显著特点是高效、低耗。它的数据处理能力非常强大,虽然寻址方式广泛(7种源操作数,4种目的操作数),但只需要简洁的27条指令即可完成,而且耗电量非常少,能够有效延长机器鱼下水的时间,非常适合做机器鱼控制芯片。
MSP430F149单片机作为“鱼体”的主控MCU,主要用来接收米自Uart-Wifi模块的数据流和控制机器鱼舵机的运转。我们用的机器鱼为三关节杆系机器鱼,这种利用杆系结构来模拟真鱼的运动的操作比较简单,只需要头尾部的配重和鱼尾各个关节转动的角度即可。
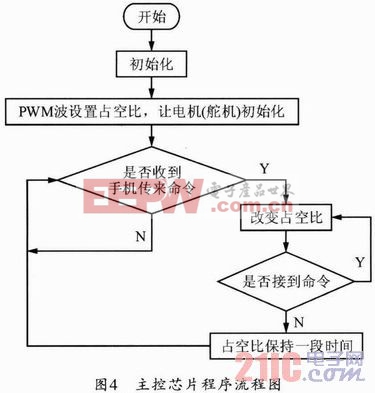
机器鱼的动力来自舵机部分,三关节机器鱼有三个舵机,每个舵机由十五位的不同占空比的PWM波控制转动不同的角度,继而控制“鱼体”摆动形成鱼体波。鱼体波是利用杆系机器鱼对真实鱼游动形态的拟合,可以认为鱼体波曲线是鱼体波幅包络线和正弦曲线的合成,它开始于鱼体的惯性。根据鱼体波原理我们编写下位机程序让单片机计算出各个关节的转动角度,产生相应的控制信号控制舵机的运作,使三个舵机相互配合产生相应的鱼体波,推动机器鱼前进。主控芯片的流程如图4所示。







评论