基于SPCE061A的智能小车机器人的设计
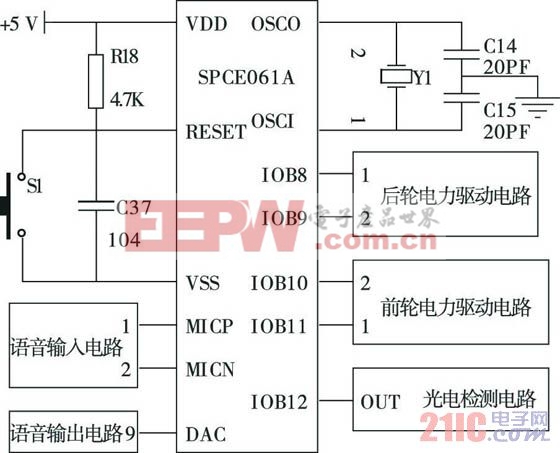
将语音输入电路的1, 2 端口分别连接到SPCE061A控制器的M ICP, N ICN 管脚上; 将语音输出电路的9端口连接SPCE061A的DAC1管脚; 后轮动力驱动电路的1, 2端连接到SPCE061A的IOB8, IOB9管脚, 前轮方向驱动电路的1, 2端连接到SPCE061A 的IOB10, IOB11管脚; 光电检测电路的OUT 端连接SPCE061A 的IOB12 管脚, 智能小车的整体连接如图6所示。
智能小车的软件系统主要采用语音辨识技术控制小车的自动行驶, 从而实现了无需手工操纵, 就能人车的互动, 智能控制算法如图7所示。软件的设计采用C语言编写, 这样可以使程序代码简介易读, 另外程序的设计还使用了SCPE061A的定时中断技术, 当光电检测电路检测到前方有障碍或有停车指令触发时, SCPE061A立即作中断处理使小车停车。
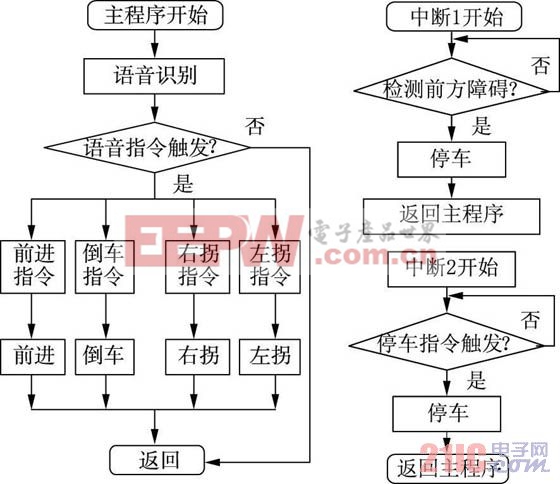
图7 智能算法框图。
智能小车的软件设计核心就在于语音辨识, 语音辨识主要分为训练和辨识( 图8) .在训练阶段, SCPE061A 控制器首先对说话人的语音进行模/数转换、预加重、自动增益控制等处理, 实现语音数字信号的数字化,然后对处理后的语音信号进行特征提取, 建立语音特征模型, 训练过程主要靠语音函数库bsrv222SDL. lib中的BSR_Tra in( )函数来完成。在辨识阶段SCPE061A 控制器对采集到的语音进行同样的分析处理, 提取出语音的特征信息, 然后将这个特征信息与已有的特征模型进行对比, 如果两者达到一定的匹配度, 则输入的语音被识别, 辨识过程主要靠语音函数库bsrv222SDL. lib 中的BSR _InitRecogn izer( )、BSR_EnableCPUIncato r( )、BSR_GetResult( )、BSR_S topRecogn ize r( )函数来完成。
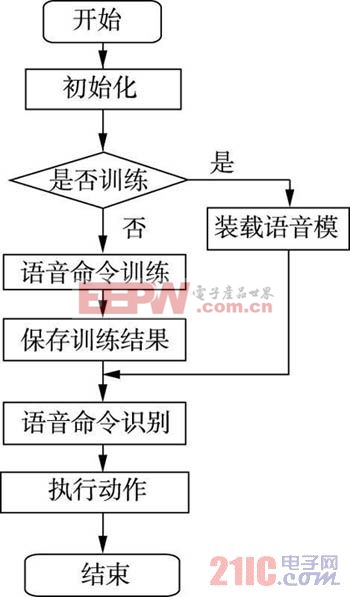
图8 语音辨识程序流程图
5 结语
实验中智能小车的正确识别率在90% 以上, 实验过程中发现, 影响小车正常辨识的因素主要包括周围环境的噪声、人与小车的距离等, 这些需要在今后改进。这种语音控制的智能小车机器人将来不仅可以为人服务, 稍加扩展, 还可以在多种不适合人作业的场合替代人执行任务。因此这种语音控制小车机器人具有重要的学术研究价值。












评论