基于SPCE061A的智能小车机器人的设计
2) 语音输出电路。
小车的语音输入电路如图3所示。其中, VDDH 为参考电压, VSS是系统的模拟地。音频信号由SPCE061A 的DAC引脚输出送到电路的9端, 通过音量电位器R9的调节端送到集成音频功率放大器SPY0030, 经音频放大后, 音频信号从SPY0030输出经J2端口外接扬声器播放声音。
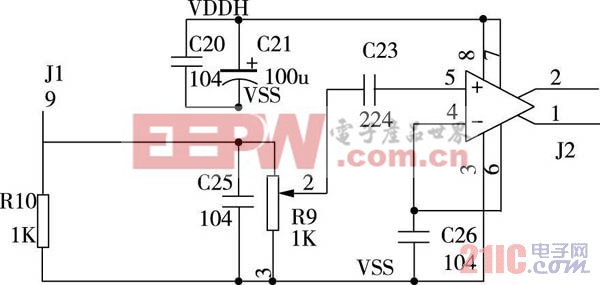
图3 语音输出电路
3) 光电检测电路。
小车的光电检测电路采用E18-D80NK型号的光电传感器, 它集发射和接受于一体, 红外发射管向某一方向发射红外线, 遇到障碍物后红外线被反射由接收管接受, 从而判断出小车的前方是否有障碍物, 对障碍物的感应距离可以根据要求通过传感器上的微调旋钮进行调节。传感器前端增加了透镜, 利用聚焦作用远距离探测物体。传感器内部集成了放大、比较、调制电路, 使传感器受可见光的影响较小, 光电检测电路的连接图如图4所示。
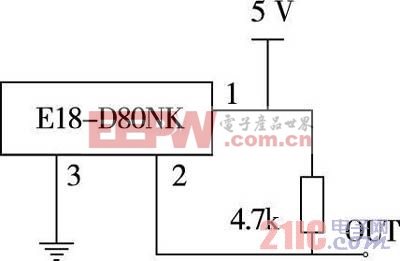
图4 光电检测电路
4) 驱动电路。
小车的驱动电路是一个全桥驱动电路( 图5), Q1,Q2, Q3, Q4四个三极管组成4个桥臂, Q5 控制Q2和Q3的导通和关断, Q6控制Q1 和Q4 的导通和关断, 驱动电路分别用于后轮动力驱动电路和前轮方向驱动电路。当1管脚为高电平, 2管脚为低电平时时Q1 和Q4 导通, Q2和Q3截止, 电动机带动车轮运转; 当1管脚为低电平, 2管脚为高电平时时Q1和Q4截止, Q2和Q3导通, 电动机带动车轮反向运转。
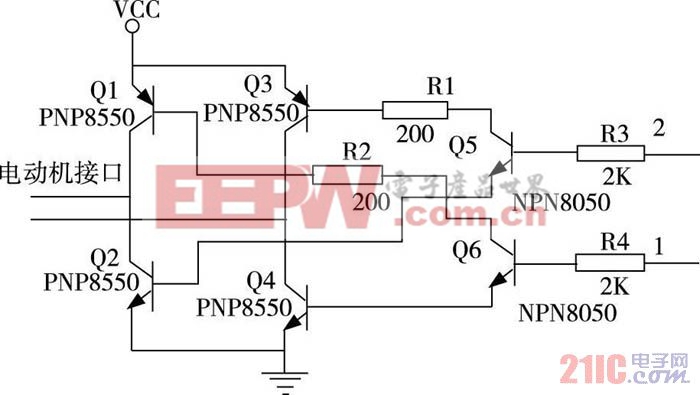
图5 驱动电路。












评论