基于Atmega16单片机的智能太阳能充电器设计
3 太阳能充电系统最大功率跟踪算法的实现本文引用地址:http://www.eepw.com.cn/article/170588.htm
光伏系统电流的变化是随着外界环境变化而变化的,要想实现光伏系统的最大功率跟踪,一般可以通过两个步骤来完成:第一步是采用合适的搜索算法,找到光伏系统的最大功率点;第二步是通过控制手段,使光伏方阵工作在最大功率点。该控制系统的总体程序流程图如图2 所示。光伏发电扰动观察法是最常用的MPPT 控制方法之一,其原理是每隔一定的时间增加或者减少光伏阵列输出电压,并观测之后其输出功率变化方向,来决定下一步的控制信号。这种控制算法一般采用功率反馈方式,通过两个传感器对光伏阵列输出电压及电流分别进行采样,并计算获得其输出功率。该方法虽然算法简单,且易于硬件实现,但是响应速度较慢,只适用于那些日照强度变化比较缓慢的场合。而且稳态情况下,这种算法会导致光伏阵列的实际工作点在最大功率点附近小幅振荡,因此会造成一定的功率损失,而日照发生快速变化时,跟踪算法可能会失效,判断得到错误的跟踪方向。针对这种算法在实际应用中遇到的情况,根据本系统实际提出了一种实用的改进算法。在本独立光伏路灯系统中,是要对蓄电池进行充电,需要考虑实现最大功跟踪的同时,还要兼顾最大限度的延长蓄电池的寿命,具体采用了不同的蓄电池充电策略,可以在程序流程图中看出。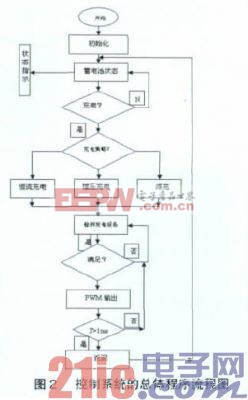
本文提出一种改进的最大功率跟踪方法,首先根据蓄电池的当前状态来判断需不需要充电,然后根据电路前级检测到的光伏电池发电的电压和电流大小来决定最大功率点的设定,将光伏发电强度分为两种工作方式,对特定的电池板取一特定的参数。在光伏发电输出调理电路的前级和后级的参数检测过程中,每隔一定的时间连续采集10 个相邻的电压、电流信号(ATmega16 有自带的A/D 转换器,设置的采样率为200 Hz),去掉最大和最小的数据后,进行均值滤波,并同时得到此时的电压和电流的大小,在整个控制采集数据的过程中,为了有效地消除随机干扰,我们在程序中设定一个幅度比例系数,即每两个信号的幅度采集值要有一定的比例关系,若超过这个比例,则认为是干扰信号,便进行这个数据的重新采样,连续超过三次采样数据都是干扰信号时,系统则自动取消这一次测量。对于采集到的有效数据,经过了均值滤波后,可以消除一定的噪声干扰,要得到更好的点参数数据,我们把采集到的数据进行LMS(即自适应最小均方滤波器)滤波,该滤波器的应用较简单,它是最陡下降梯度算法,用梯度的瞬时值迭代,从而使均方误差最小化,用这种方法处理的数据效果非常好,对弱信号处理中有很好的应用前景,通过试验,我们选定滤波器阶数为三阶,收敛因子μ(步长)为0.001,权矢量W 初始化为:W=[0,0,0]T,其递推公式为:
式中:x (k) 为观测样本;X (k-1)为过去的观测样本矢量;WT(k-1)X(k-1)表示基于过去的观测样本而预测的现在的信号,这里选择预测误差e(k)=x (k)-WT(k-1)X(k-1)作为调节权重的参数,可以证明,预测误差最小等价于恢复误差 最小。通过LMS 滤波器后,我们可以得到比较理想的数据,为实时准确提取出最大功率所需要的参数提供了条件,也找到了参数的特征,有助于进一步的数据提取。当然还有其他的提取参数的方法,诸如频域滤波,FFT 变换,小波变换等等,本系统采用该方法以后,数据采集的准确度有了很大的提高,可以对于弱信号参数的情况也能实时找到最大功率点,从而实现了对太阳能的最优利用和蓄电池的科学管理。
最小。通过LMS 滤波器后,我们可以得到比较理想的数据,为实时准确提取出最大功率所需要的参数提供了条件,也找到了参数的特征,有助于进一步的数据提取。当然还有其他的提取参数的方法,诸如频域滤波,FFT 变换,小波变换等等,本系统采用该方法以后,数据采集的准确度有了很大的提高,可以对于弱信号参数的情况也能实时找到最大功率点,从而实现了对太阳能的最优利用和蓄电池的科学管理。
4 结束语
美国英特梅尔(ATMEL)公司推出的ATmega16 系列单片机具有低功耗、实时处理能力强、运行速度快等优点,性价比高,正日益得到广泛的应用,尤其在自动信号采集系统、便携式设备、长时间工作装置中,体现了它的特点,本文所述的智能太阳能充电控制系统充分利用了ATmega16 系列单片机所提供的各种集成模块,合理分配片上资源,大大简化了外围电路的设计,从而提升了整个控制系统的性能。








评论