声导航自行小车研究
1.2.2 声接收及硬件滤波模块
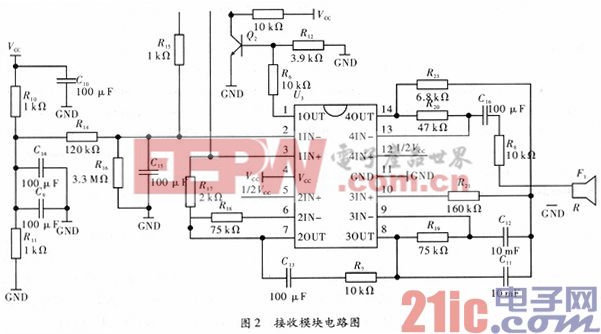
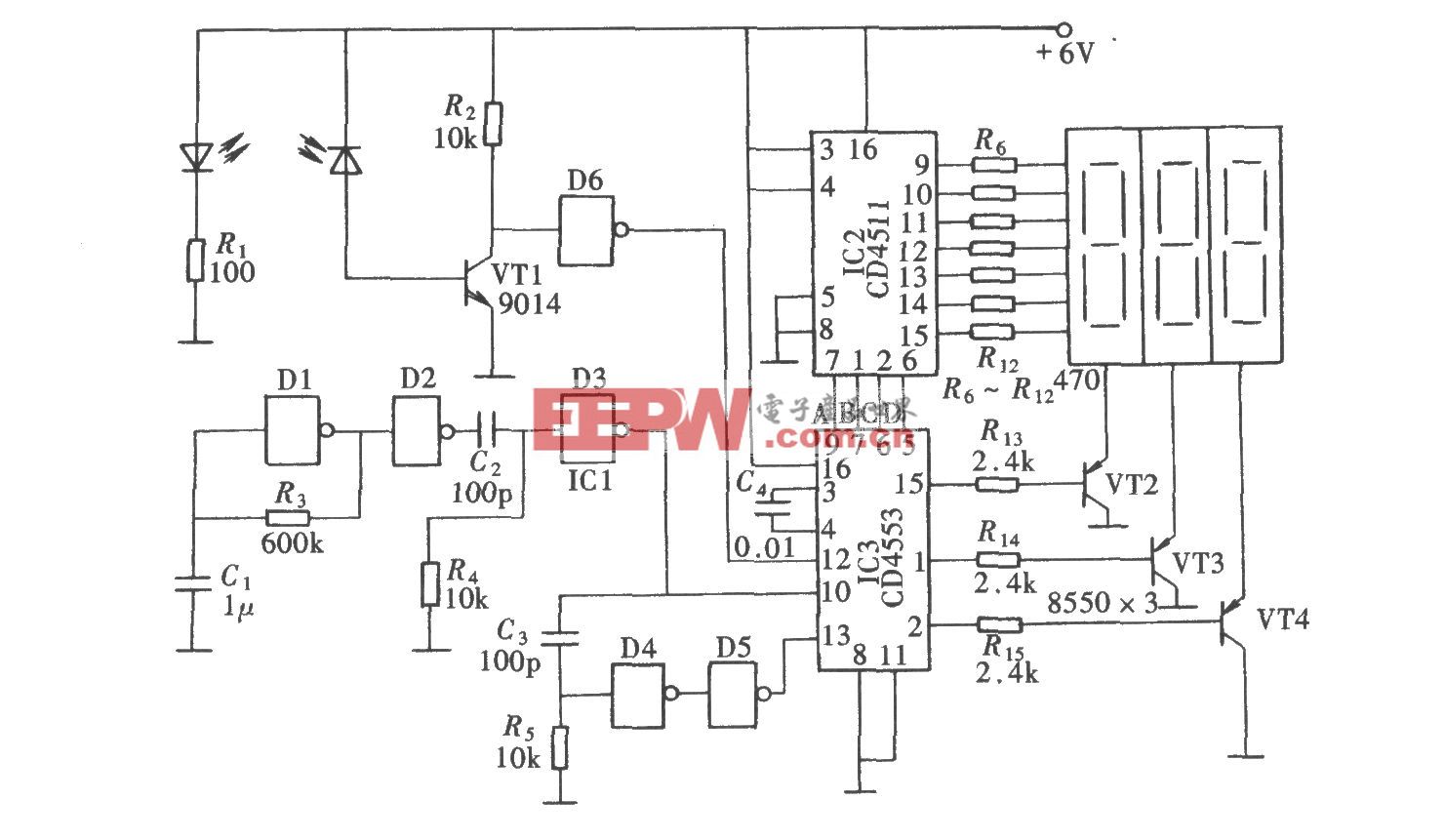
该模块也采用SRF05超声波传感器作为系统的通信模块,作为接收端,没有使用发射功能。接收端接收信号后,通过硬件滤波,判断是否为有效信号。图2为接收模块的电路图。若接收到40 kHz的信号电路导通,I/O口Echo输出高电平、OUT端输出1;若接收到的信号中没有40 kHz的信号电路不导通,I/O口Echo为低电平、OUT端为0。该系统使用了3个接收端,其位置关系如图3所示。本文引用地址:http://www.eepw.com.cn/article/170534.htm
1.2.3 FPGA计算时间差模块
模块采用Altera FPGA CyclonelI EP2C5T144计算时间差。信号接收端1接收到有效信号后触发FPGA的计数器,接收端2接收到有效信号后停止计数且触发另一个计数器,接收端3接收到有效信号后停止计数。计数数值乘以FPGA的频率可以得到两个时间差。
1.2.4 单片机模块
采用飞恩卡尔智能车芯片MC9S12XS128。该芯片接收到FPGA传来的两个时间差,再利用麦克问距、声速算出声源距离小车的距离r和角度α,并产生合适的PWM驱动电机使小车准确到达声源处。
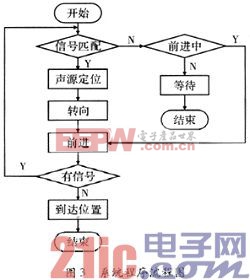
2 软件设计
图3为系统程序流程图。







评论