基于瑞萨单片机自动寻迹智能车的设计
摘要 以瑞萨超级MCU模型车大赛为背景,设计并实现了一种智能车自动寻迹系统。采用瑞萨16位微控制器H8/3048F作为核心控制单元,使用光电对管RPR220采集路面信息,自动控制舵机转向,并对直流电机转速进行PID调节,从而实现智能车稳定、快速的行驶。实验结果表明,该套设计方案简单可靠,具有良好的控制性,满足设计要求。
关键词 瑞萨;自动寻迹;智能车;PID控制
随着计算机、通信、传感器等技术的发展,智能车成为汽车发展的趋势。传感器技术在智能车的应用中越来越广泛,如在夜间、雾天、高危高污染等环境下的行驶。智能车将成为人们生活的一部分。文中以瑞萨智能车大赛为背景,设计了一种以16位微控制器H8/3048F作为小车的控制核心,采用红外反射传感器检测路面引导线,能根据给定参数行驶的电动车。文中从硬件和软件方面详细阐述了智能车工作原理和设计方法,设计的小车具有电路设计简单、软件控制高效等优点。
1 系统总体设计方案
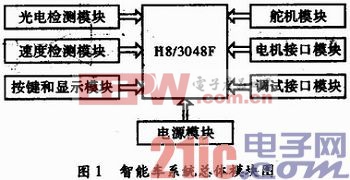
本智能车利用车体前方的光电传感器采集赛道信息、后轴上的光电编码器采集车轮转速的脉冲信号。这些信号经单片机调理后,用于控制小车的运动。同时,内部模块产生的PWM波驱动直流电机,对智能车进行速度及转角控制,使赛车在赛道上能够自动、平稳行驶,并以最短的时间和最快的速度跑完全程。此外,本系统还增加了按键和显示设备,以便于调试。智能车系统总体模块图如图1所示。
2 硬件设计
硬件设计是设计的基础,包括整车供电的电源管理电路设计、电机的驱动电路设计,以及单片机的各个接口电路的连接设计等。
2.1 控制器模块
H8/3048F单片机是的日立公司生产的16位高性能微控制器。H8/3048F内部有16个16位通用寄存器。其最高时钟频率可达18 MHz,寻址空间为16 MByte。芯片内部包括:9个I/O口、32 kByte Flash、2 kByte RAM、16位的集成定时单元(ITU)、可编程定时式样控制器(TPC)、j监视定时器(WDT)、串行通信接口(SCI)以及A/D、D/A转换器等。控制器I/O口分配如下:P70~P77光电传感器信号的输入;PB用于车速检测信号的输入;PA用于启动传感器板信号的输入。控制器根据检测到的路况和车速信息,控制转向舵机和直流驱动电机,相应地调整小车行驶方向和速度,最终使智能车按给定路线稳定、快速地行驶。
2.2 电源模块
选用8节1.2 V镍氢电池为直流电机供电,并经降压、稳压后给单片机系统和其他芯片供电。蓄电池具有较强的电流驱动能力以及稳定的电压输出性能,且性价比高。电源部分采用LM2940CT芯片。该芯片最大能提供3 A的电流输出,完全满足系统要求。模块采用两片2940芯片,一片单独给MCU供电,一片给其他部件供电。
2.3 寻迹传感器模块
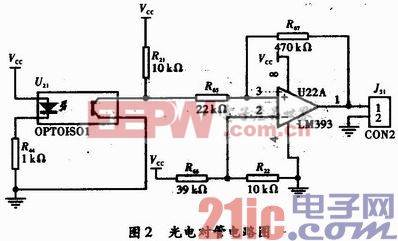
模块采用一体化反射型光电对管RPR22D。其发射器是一个砷化镓红外发光二极管,接收器是一个高灵敏度的硅平面光电三极管。RPR220具有如下特点:结构紧凑、抗干扰能力强、反应速度快。内置可见光过滤器能减小离散光的影响。当发光二极管发出的光反射回来时,三极管导通输出低电平。此光电对管调理电路简单,工作性能稳定。传感器检测与调理电路如图2所示。经示波器观察,输出波形规则,可以直接供单片机查询使用。
小车对白线的检测使用了9个等距排列的红外管采集路径识别路面信息。从左边的光电管开始循环采集数据,检测其是否在白钱上,如果在白线上,则接着检测其右边的光电管是否亦如此,依次向右推进,当出现3个以上光电管同时处于白线上方,则过滤掉当前采样数据,采用历史值。

pid控制相关文章:pid控制原理
手机电池相关文章:手机电池修复
单片机相关文章:单片机教程
单片机相关文章:单片机视频教程
单片机相关文章:单片机工作原理
pid控制器相关文章:pid控制器原理
电流变送器相关文章:电流变送器原理










评论