基于单片机C8051F020 的数字多电机控制平台的设计
直流电机是可以直接采用电源直接驱动的,设计直流电机驱动电路的主要目的就是对电机的转速和转向进行控制。在本系统中采用了桥式电路,如图4 所示。
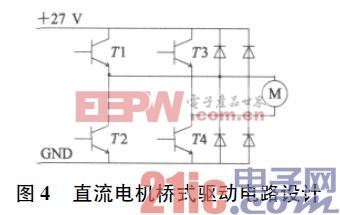
这种桥式电路非常适合用来做数字控制,只需单片机按照一定的逻辑和时序控制开关管的开通关断,就能实现直流电机的正反转,也能调节电机绕组通电的占空比,从而达到改变电机转速的目的。
2. 5 场效应管选择
本系统中选用的功率元件为IR 公司生产的IRF840 功率MOSFET,其工作电压可达500 V,工作电流最高8 A,IRF840 MOSFET 功率管的驱动功率小,工作速度高,开关时间短,热稳定性好,抗干扰能力强,完全满足系统的设计要求。
2. 6 电源设计
电源设计过程中为防止各种电源之间互相干扰,尤其是模拟大电源对数字电路部分产生噪声影响,充分考虑了电源滤波的需求。在电路设计时,对供电电源做滤波处理,对控制信号做光电隔离处理。
对输入电源使用单独接插件和单独电源滤波器。对信号的输入和大功率的输出,也要分别使用接插件进行物理隔离。电机运转时最大瞬时电流可高达2A.为减少大功率输出对数字电路产生影响,在设计时,采取有效的抗干扰措施,如将大功率输出信号与数字信号采取有效光电隔离。
3 软件设计
系统的软件设计采用模块化程序设计。主程序主要完成的内容: 系统参数初始化、通讯指令解析、开启中断、进入子程序模块输出控制信号等。每个电机的不同动作均采用不同的子程序模块,维护方便。系统主程序流程图如图5 所示。
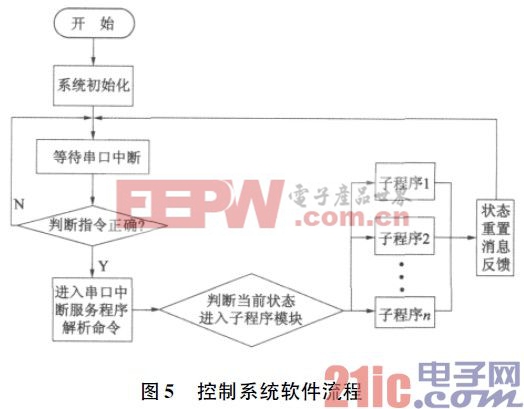
上电后,单片机程序初始化芯片的端口设置及变量初始赋值。当串口中断发生,接收上位机发来的命令消息和发送反馈消息给上位机。然后解析本次命令,按具体内容进入不同的运程序,来控制不同的电机动作。
4 结语
本文所述的控制方案,在一个系统中集成了四个电机的驱动控制电路,所有功率放大单元均采用场效应管自行搭建,在小功率步进电动机及直流电机驱动控制中有较强的通用性,最大驱动电流可达6A.可以不作任何的硬件改动,仅通过重写软件,就可以直接应用在其它系统中驱动直流或步进电动机











评论