基于视觉暂留的动态扫描LED旋转屏
2 POV LED硬件设计
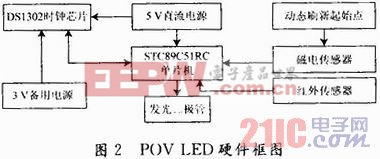
2.1 硬件框图
控制系统是以STC公司的STC89C51RC单片机为控制计算核心,POV LED硬件结构如图2所示。红外传感器接收红外信号,包括控制系统的控制信号及时钟芯片的数据信号,时钟芯片由主电源与备用电源双供电,主电源掉电时仍可保证数据安全。磁电传感器接收定位信号,该信号用于定位并开始一轮新的动态刷新,从而使信息稳定显示。单片机综合处理以上数据,将需要显示信息的二进制编码以高低电平形式传送至发光二极管。本文引用地址:http://www.eepw.com.cn/article/167869.htm
2.2 显示定位与磁电传感器
与点阵LED不同,POV LED每副画面刷新结束后,需要重新显示I=1及以后一系列时刻的图像,这些图像没有固定的坐标,若旋转转速不恒定,则画面将会发生抖动,无法稳定显示信息。如果人为在某点处放置一粒小磁钢,将该点作为刷新零点或物理零点,则磁电传感器在圆周运动时必将经过该点,由硬件产生一个中断信号,此时单片机认定运行至零点,指针自加并显示新信息直到完成该圈的图像刷新。
显示定位所用磁电传感器AH3144E是由电压调整器、霍尔电压发生器、差分放大器、史密特触发器和集电极开路的输出级组成的磁敏传感电路,其输入为磁感应强度,输出是一个数字电压信号,是单磁极工作的磁敏电路,适合于矩形或者柱形磁体下工作。
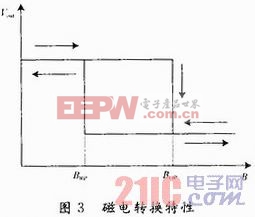
磁电传感器靠近物理零点时,磁通量密度B不断增加,当大于BOP极限时,输出端Vout是低电平,硬件产生一个中断信号。当磁电传感器经过物理零点并远离时,相应的磁通量密度B向BRP端移动。当B>BRP时,输出端管脚是闩锁低电平;当BBRP时,输出端Vout输出进入高电平,如图3所示。
2.3 红外解码
红外遥控器与电器之间的通信存在一个通信协议,一般是单向的通信协议。这个单向的通信协议称为红外遥控编码协议。本文使用NEC红外编码协议,当发射器按键按下后,即有遥控码发出,所按的键不同遥控编码也不同。这种遥控码具有以下特征:
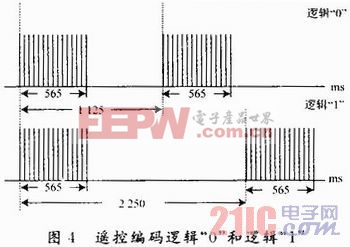
采用脉宽调制的串行码,以脉宽为0.565 ms,间隔为0.56ms,周期为1.125ms的组合表示逻辑“0”;以脉宽为0.565ms,间隔1.685 ms,周期为2.25 ms的组合表示逻辑“1”,波形如图4所示。
上述逻辑“0”和逻辑“1”组成的32位二进制码由38 kHz的载频进行二次调制以提高发射效率,达到降低电源功耗的目的,然后再通过红外发射二极管产生红外线向空间发射。
置于POV LED上的红外传感器接收空间红外信号并对之解码,所得到的信息用于控制电子屏显示画面的更换,如字幕与数字时钟切换;读取时钟芯片数据并显示;设置新数据并写入时钟芯片等。










评论