基于Autoface的捷联惯导显控系统设计

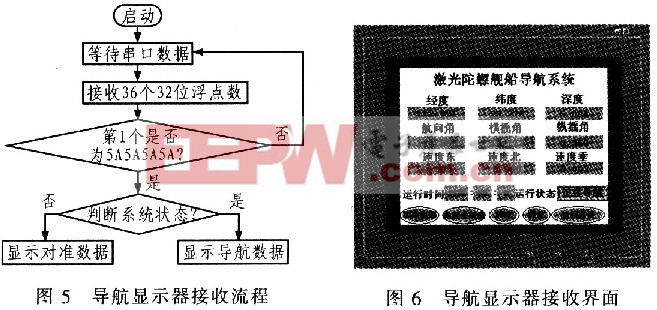
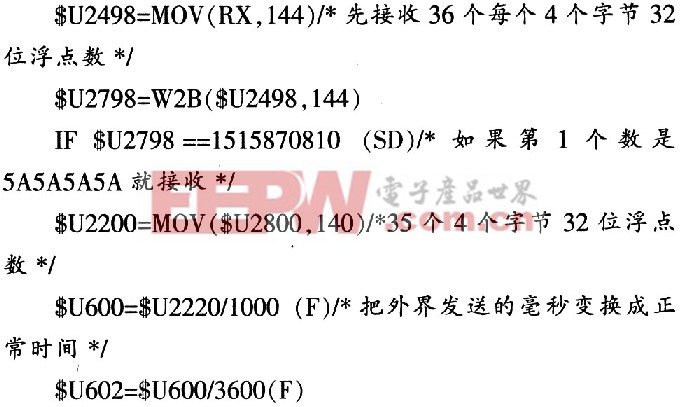
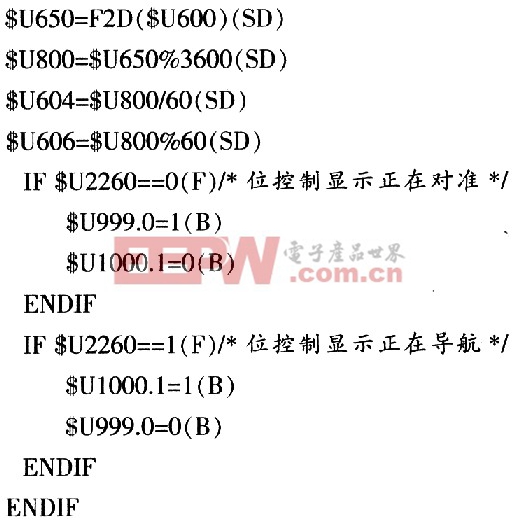
主体导航系统接收到工作命令后会正常工作,同时传输原始的导航参数,这时PC104接收这些导航参数并进行参数解算,解算后将实际参数传给VT5057L,触摸屏的显示阶段流程如图5所示。图6为导航显示器实际接收的导航结果。为了消除环节因素以及通信误码对PC104和VT5-057L之间的传输产生影响,增加了校验功能,显示阶段宏命令代码如下:本文引用地址:http://www.eepw.com.cn/article/166632.htm
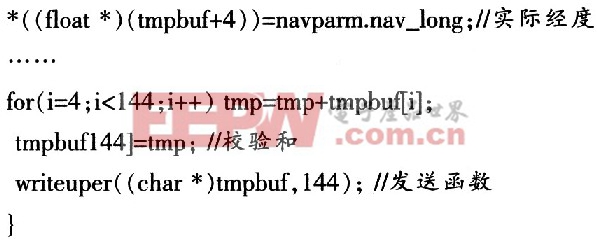
导航数据处理计算机的软件采用VC++编写,在DOS下使用TC3.1调试。由于实际的战场环境可能变化无常,整个系统的数据通信量又非常大,主体导航系统和显控系统都可能出现各种问题从而导致数据传输出错;为了防止此类事情的发生,在导航计算机内部也增加了数据校验环节,发送函数代码如下:
3 结论
本文设计了一种基于触摸屏和PC104的显控系统,给出了PC104计算模块的框架结构和触摸屏及导航计算机软件编写流程,二者通过RS-232串口双向通信,经过4000小时不间断测试,数据显示依然正常。该显控系统体积小、重量轻、可靠性高,可应用于海军舰艇惯导系统。












评论