PAL一体化摄像机设计
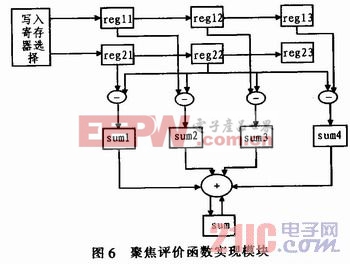
图6为聚焦评价函数实现模块。图中,聚焦评价函数实现模块读取的2行数据,由写入寄存器选择模块来选择中心像素所在行,写入第2列寄存器。在时钟同步作用 下,每时钟将像素右移进入下一个寄存器,同时寄存器regll,regl2,regl3,reg2l中的数据同reg22中的数据作减法,取得差值 suml、sum2、sum3、sum4,相加得到和sum。当一帧图像结束,sum中的数据成为该帧的亮度差值和。当前帧计算的结果与前一帧的计算结果 相比较,若当前帧的函数值大于前一帧的函数值,说明当前图像比前一帧图像清楚,则输出结果OUT为'1’,反之则输出'0’。本文引用地址:http://www.eepw.com.cn/article/166316.htm
采用爬山搜索算法确定光学聚焦位置。在自动聚焦使能信号有效后,驱动马达从初始位置正转8步,反转8步,然后再反转8步,正转八步,回到初始位置。每转1 步检测聚焦评价函数模块的输出out值,将4个8步内检测到‘1’的个数分别保存为suml、sum2、sum3 sum4,接下来进行统计分析,如果suml≥16,则认为正转方向为聚焦方向;若sum2≥6则认为反转方向为聚焦方向;如果suml、sum2都未大 于等于6,则计算suml+sum4和sum2+sum3;如果suml+sum4≥sum2+sum3,则认为正转方向为聚焦方向,否则认为反转方向为 聚焦方向。确定出聚焦方向后驱动步进马达带动镜头向聚焦方向一步一步转动,每转一步检测聚焦评价函数算法模块的输出OUT值,若连续转的2步输出out都 为‘0’,则认为超过最清晰位置,则驱动步进马达倒退2步,镜头达到最佳聚焦位置。
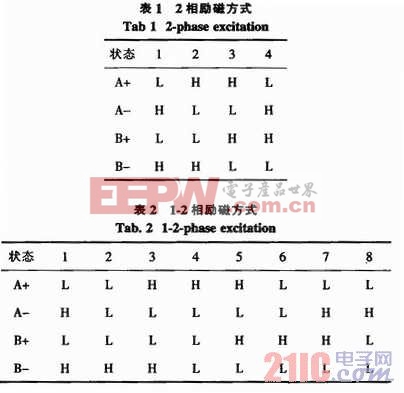
步进马达驱动包括变焦马达驱动和聚焦马达驱动,变焦马达实现变倍,聚焦马达用来聚焦。变焦马达和聚焦马达的励磁方式不同,变焦马达采用2相励磁方式,见表 l。聚焦马达采用的是1.2相励磁方式,见表2。其中A+、A-分别代表A相绕组正端和负端功率桥控制信号,B+、B-分别代表B相绕组正端和负端功率桥 控制信号。按照表中所示的电平信号,外加在步进马达的两组线圈上,利用线圈间脉冲的相位差产生的扭矩来驱动马达步进工作。按照表中所示的脉冲顺序,从左向 右变化可实现步进马达的反转;反之则实现正转。以变焦马达驱动为例,在FP-GA内设计一个状态机,实现4个状态间的状态转移,每一次变倍使能有效时,根 据当前状态转移,变倍方向转移到下一个相邻状态,输出该状态时对应的4个控制电平信号,驱动马达转动,实现变倍功能。需要注意的是,由于FPGA输出脉冲 信号的驱动电平和电流与步进马达的驱动要求不匹配,应在FPGA输出引脚外接驱动桥电路。











评论