洁净手术室空调控制系统的设计与实现
3.3 温湿度控制
软件设计的核心部分是温湿度控制,采用PID控制来调节温湿度。PID控制指的是闭环控制系统的比例积分微分控制。
常规PID控制系统的框图如图4所示。
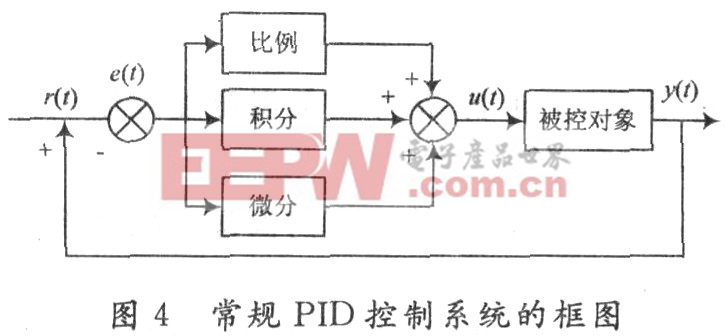
PID是一种线性控制器,它根据给定值r(t)和实际输出值y(t)构成控制偏差:
e(t)=r(t)一y(t)
将偏差比例(P),积分(I)和微分(D)通过一定线性组合构成控制量u(t)对被控对象进行控制。它的控制规律为:

式中:KP为比例系数;TI为积分时间常数,TD为微分时间常数。
当控制量的目标值与检测值之间存在误差(或称为控制偏差)时,误差小,操作量就小,误差越大,操作量就越大,故控制算法中含有偏差比例项,简称P动作。对具有自平衡性的控制对象施行比例控制,最后其步阶变化会留下一定的误差,称为稳态误差或偏移。使控制算法中含有误差积分比例项,可消除稳态误差,简称I动作。偏差的增减反映在操作量上,为了改善控制特性,所以使控制算法中含有偏差微分比例项,简称D动作,为一种预先动作。包含以上三种动作的控制算法即为PID控制。
式(1)也可以写成:

式中:KI=KP/TI为积分系数;KD=KP・TD为微分系数。
考虑到被控对象具有大滞后性,且PLC处理的是数字量,将式(2)离散化得:
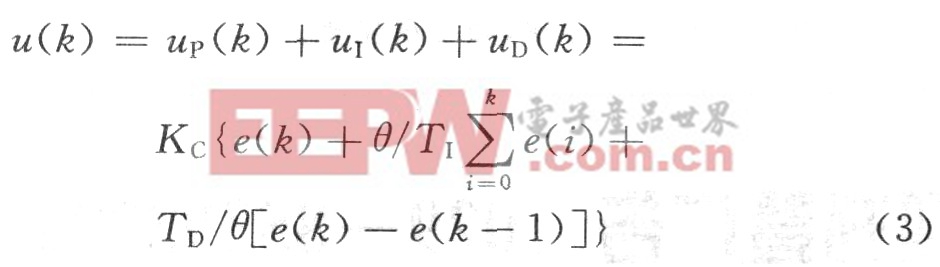
式中:θ代表采样周期,e(k)代表此刻的误差,e(k一1)代表上次采样周期的误差。如果θ足够小,这种逼近可相当准确,被控过程与连续控制过程十分接近。这种算法称为位置式算法。位置式算法由于全量输出,所以每次输出均与过去的状态有关,计算时要对e(k)进行累加,计算机运算工作量大。而且,因为计算机输出的u(k)对应的是执行机构的实际位置,如计算机出现故障,u(k)的大幅度变化,会引起执行机构位置的大幅度变化,这种情况往往是生产实践中不允许的。考虑到本系统控制对象均为阀门,故采用增量式PID控制算法为宜。

















评论