基于神经网络的多电机同步控制
(2)BP神经网络,根据系统的运行状态,调节PID控制器的参数,以期达到某种性能指标的最优化,使输出层神经元的输出对应于PID控制器的3个可调参数KD、Ki、Kd。通过BP神经网络的自学习、加权系数的调整,使BP神经网络输出对应于某种最优控制规律下的PID控制器参数。以电机作为控制对像,一般采用增量式PID控制算法进行控制。它的控制算式为:
 本文引用地址:http://www.eepw.com.cn/article/163799.htm
本文引用地址:http://www.eepw.com.cn/article/163799.htm式中KP、KI、KD分别为比例、积分、微分系数.
3.2 神经网络PID的算法实现
1)训练阶段的工作
第l步:设计输入输出神经元。本BP网络的输入层设置3个神经元,分别为输入速度vi、速度偏差e和偏差变化量△e,输出层有3个神经元,为PID控制器的3个可调节参数Kp、Ki、Kd
第2步:设计隐含层神经元个数。本文初步确定隐含层节点数为5个.学习一定次数后,不成功再增加隐含层节点数,一直达到比较合理的神经元数为止;
第3步:设计网络初始值。本文中设定的学习次数N=5000次,误差限定值E=0.02;
第4步:应用Simulink对BP网络进行训练和仿真。
2)测试阶段的工作
在测试阶段,主要是对训练过的网络输入测试样木,测试网络的学习效果,即判断网络的运算值与样本的期望值之差是否在允许的范围之内。在此不再赘述具体判定过程。
4 仿真与分析
本文以2台电机同步为模型进行仿真。在电机的参数设定时,对2台电机的参数取相同值。电机参数为:定子每相绕组电阻R=5.9Ω,定子d相绕组电感Ld=0.573,转子电阻R=5.6Ω转子电感L=O.58给定转速n=500rad/sec,极对数为3。在t=0.05 s时,突加阶跃扰动,利用Matlab对传统PID和神经网络PID分别进行仿真,得到实验曲线如图所示.
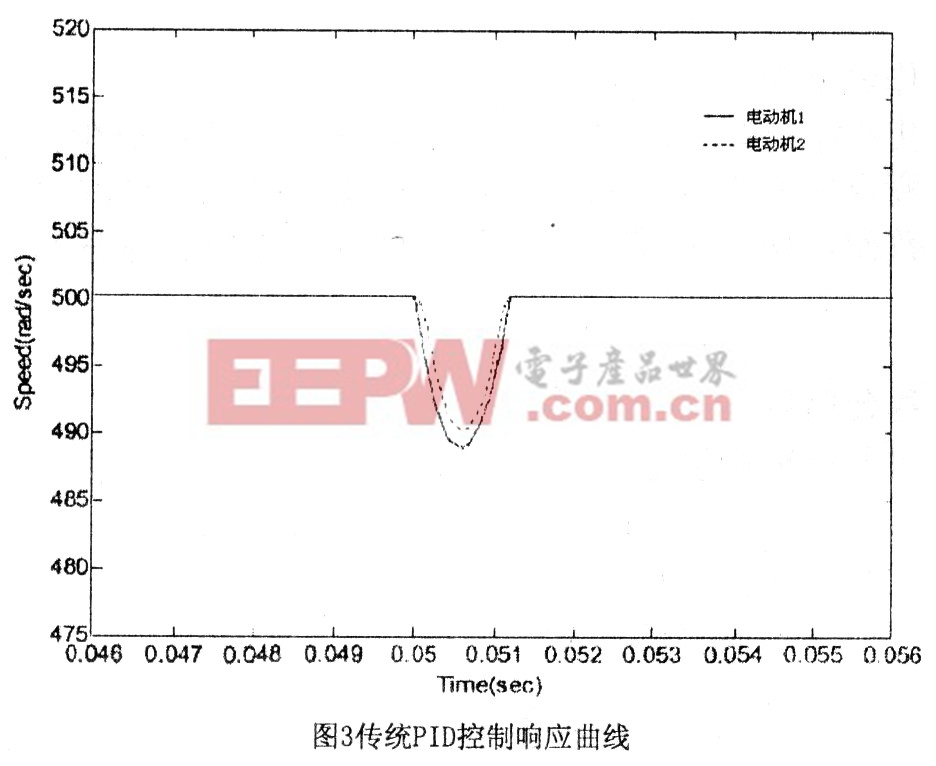
图4神经网络PID控制响应曲线 
比较两种仿真结果,经计算采用常规PID补偿器时,突加负载扰动后,同步误差△Verror=0.26%采用神经网络PID补偿器时,突加负载扰动后,同步误差△Verror.=O.08%,由些可以看到采用神经网络PID补偿器方法的时候,系统的同步性能、抗干扰性能优于只采用常规PID补偿器时的性能,其具有更好的控制特性。
5 结束语
本文针对于多电机同步控制中出现的多变量、强耦合、具有大惯性环节、难以建立准确数学模型的被控对象,在传统PID的基础上引入神经网络的的概念,将神经网络PID用于速度同步补偿中,仿真结果表明,该方法使系统的抗干扰能力增强,同步精度有所提高,控制效果良好。

pid控制器相关文章:pid控制器原理











评论