基于LabVIEW与MATLAB的模糊参数自整定PID控制
1 引言
本文引用地址:http://www.eepw.com.cn/article/163792.htm传统的PID控制器结构简单,稳定性好,可靠性高,制造技术成熟,已广泛应用于工业生产过程的控制中。但它主要适用于控制具有确切模型的线性过程,而对于具有非线性、大滞后和时变不确定的系统,则无法达到理想的控制效果。人工智能的兴起和快速发展为控制领域提供了全新的方法。模糊控制是人工智能控制的一个重要分支,它是运用模糊数学的基本理论和方法,把规则的条件、操作用模糊集表示,并把这些模糊控制规则及有关信息作为知识存入计算机知识库中,然后计算机根据控制系统的实际响应情况,运用模糊推理决定系统控制量的大小。将模糊理论与PID控制策略相结合,可实现对PID参数在线自适应调整,使系统既具有模糊控制的灵活、适应性强的优点,又具有PID控制精度高的特点。模糊控制器是当前控制领域的研发热点之一,其研发的方法不尽相同。本文阐述了利用LabVIEW与MATLAB混合编程技术将MATLAB中的模糊逻辑工具箱(FIS Toolbox)与LabVIEW虚拟仪器开发软件集成,研制出模糊参数自整定PID虚拟控制器,并实现了对非线性系统的实时测控。
2 Fuzzy-PID控制策略
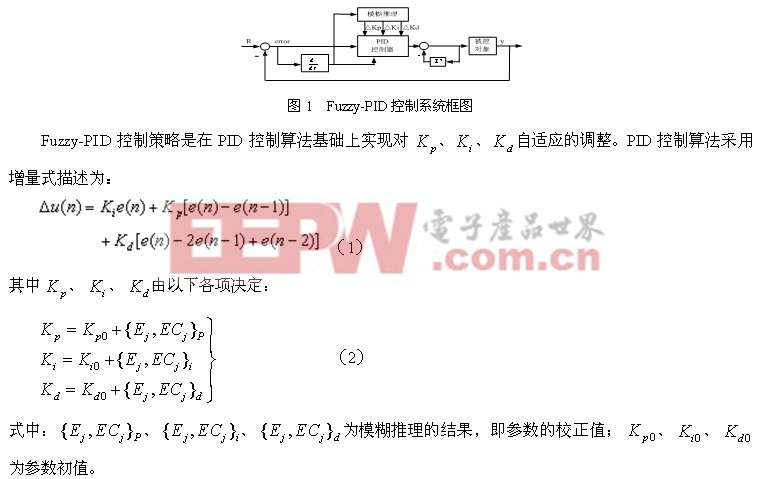
模糊参数自整定PID控制器以系统偏差E和偏差变化EC作为输入,可以满足不同时刻的E和EC对PID参数自整定的要求。利用模糊控制规则在线对PID参数进行修改,便可构成模糊参数自整定PID控制系统(以下称Fuzzy-PID控制系统),其结构如图1所示:
3 控制器设计
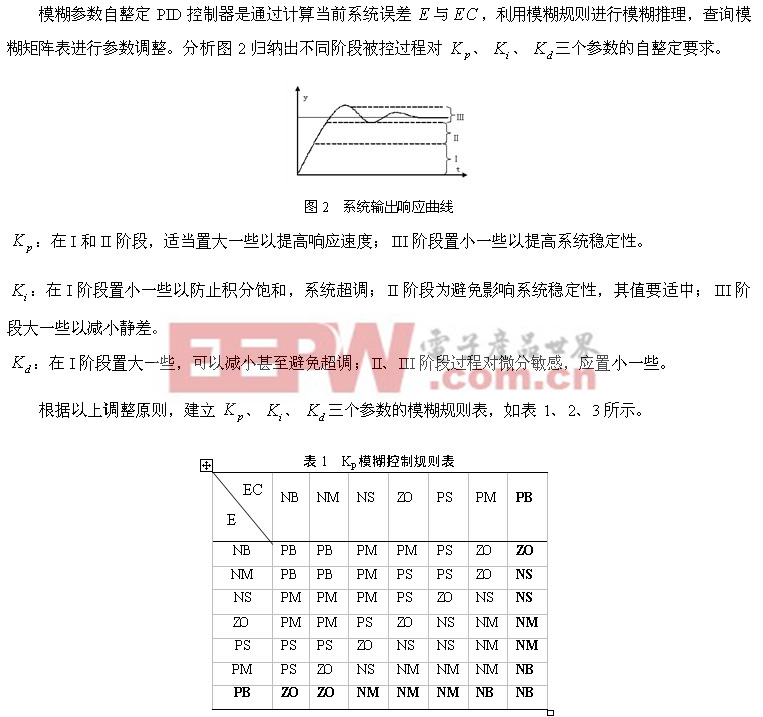
模糊控制设计的核心是总结工程设计人员的技术知识和实际操作经验,建立合适的模糊规则表,并组建一个推理结构,实现模糊规则。
3.1 模糊规则表的建立

3.2 FIS 推理结构的编辑

pid控制相关文章:pid控制原理
pid控制器相关文章:pid控制器原理













评论