具有温度补偿的无人机高度传感器
3.系统软件设计
3.1 系统软件设计流程
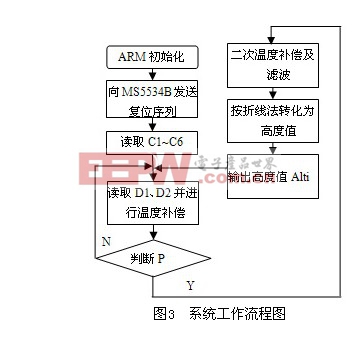
每个MS5534B在出厂时都有一个针对模块特有的四个Word校准数据,储存在64位的PROM中。ARM7微处理器在初始化以后通过串口从MS5534B中读出Word1~Word4,然后运用逻辑移位操作方式转化为6个校准补偿系数C1~C6。ARM7微处理器从MS5534B不断读取绝对气压值D1和温度值D2,然后结合校准补偿系数计算求得相对气压值P,判断其是否在有效范围内,对有效值进行低通滤波处理,最后按折线法转化为海拔高度值。将高度值通过与飞控系统相连接的无线数据传输模块实时传输到地面站,实时掌握飞机的飞行高度,对出现的意外情况可以及时处理[5]。基于MS5534B的高度测量系统的软件流程图3如下所示。
3.2 折线线性拟合法将气压值转化为高度值
在实际应用中,大气压力与海拔高度的关系是非线性的[6],传统的方法是将气压值与对应的高度值做成数据表,运用查表的方式,如果精确到1m,则需要上万个数据,需要庞大的存储空间,且耗时较大,另外由于飞控系统中微处理器对大量浮点运算的能力不是很强,并且飞控系统对实时性要求很高,为了节省宝贵的存储空间,所以本系统设计运用折线法进行线性拟合[7]。折线线性拟合法的基本思想就是将被逼近的函数曲线根据变化情况分成多个间隔区域值,为了提高精度及缩短运算时间,各间隔域值内可根据精度要求,采用不同的斜率线性线段表示曲线线段。拟合原理误差分析如图4所示。

根据大量实验数据和理论推导得拟合公式(1)
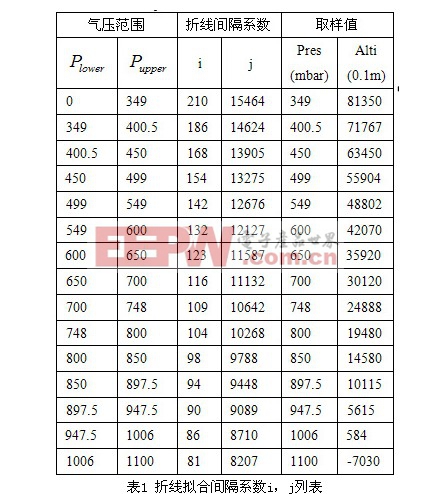
其中,alti表示海拔高度(0.1m),pres表示气压值(mbar),j,i表示折线间隔系数。在不同的i,j取值范围内,大气压向高度转化时是线性的,提高了转化的时间,误差是周期性的,且在一个小的范围内。将正常的工作高度范围内分成不同的多段,会得到不同的高精度值。i,j的一种分段列表,如表1所示。







评论