电机软启动自整定模糊控制器的研究与设计


4.3 模糊控制器参数自整定
在启动过程中遵循的自整定规则如下:
当e和ec较大时,缩小K1和K2,降低对大偏差的分辨率,减少偏差,缩短过渡过程时间。当e和ec较小时,系统已接近稳态,这时应增大K1和K2,提高系统对小偏差的分辨率,提高控制的灵敏度;当误差e较大,且与误差变化ec符号相反时,应适当增大控制器k3的大小。当误差e较大,且与误差变化ec符号相同时,系统响应正加速偏离设定值,为减小这种不利趋势,也应适当减小K3。系统响应在设定值附近时(此时误差e较小),为防止产生较大的超调或欠调,K3应该具有较宽的变化范围。适当减小比例因子以减小超调。经过多次仿真和实验,随着偏差Ke和偏差变化率Kec的变化,K1、K2和K3分别按表5、6、7取值,可以得到理想的控制结果。

5 系统仿真与分析
利用MATLAB的Simulink和SimpowerSystems、FuzzyLogicToolbox等工具进行的系统仿真。
5.1 仿真模型的建立
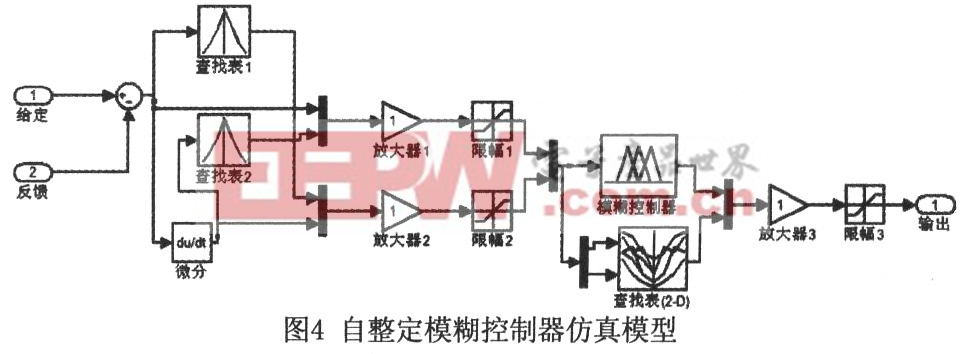
结合上述的方法建立的自整定模糊控制器仿真模型如图4:
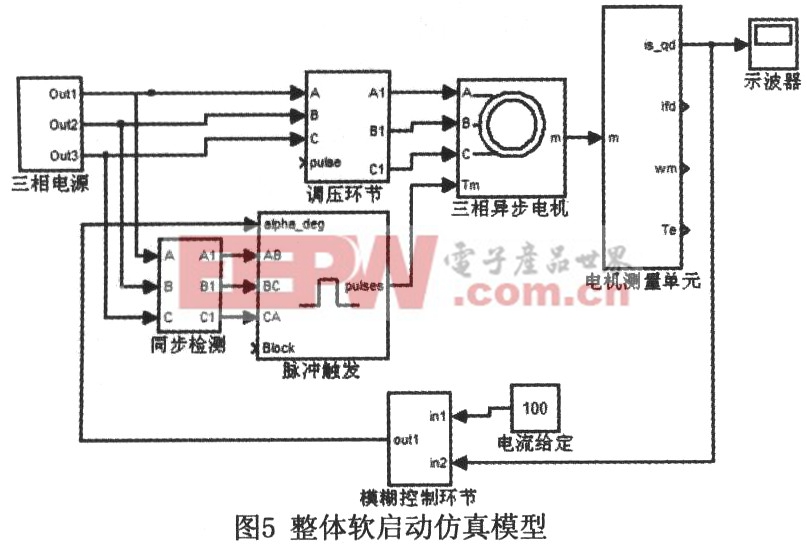

结合三相电源模块、同步环节模块、脉冲发生环节模块、三相交流调压环节模块以及控制环节得到整体软启动仿真模型如图5。
将采用传统PID控制器获得的响应曲线和采用自整定模糊控制器获得的响应曲线对比可知,采用自整定模糊控制器获得的控制效果更为理想,具体表现为:超调量较小、启动过程平稳,其输出量几乎和给定量达到重合。通过以上的对比可知,自整定模糊控制器的控制性能优于传统PID控制的控制性能,同时,也说明了本文设计的自整定模糊控制器获得了较好的控制效果。
6 小结
本章结合电动机软启动的特性在吸取自适应和模糊控制算法各自优点的基础上,介绍了限流软启动自整定模糊控制器设计的整个过程;并对整个软启动控制系统进行了动力学建模,最后,利用MATLAB的power system模块库以及Simulink模块库建立仿真模型功能进行了系统仿真,仿真结果表明,自整定模糊能够在软启动控制上取得较好的动、静态性能。








评论