CAN总线解决方案在拉丝机上的应用
1、全数字化的速度和位置控制功能,并提供位置、速度和扭矩的控制功能;
本文引用地址:http://www.eepw.com.cn/article/163602.htm2、灵活多变的跟踪控制方式,提供高灵敏度的跟踪效果;
3、可编程控制的数字输入输出;
4、可监控电机短路、电压、温度、编码器、位置跟踪和电流过高等故障;
5、可通过RS232、RS485、Profibus、CAN通讯口进行参数设定;
因此我们的伺服驱动器完全有能力胜任这份工作,下面大致介绍下这套系统:
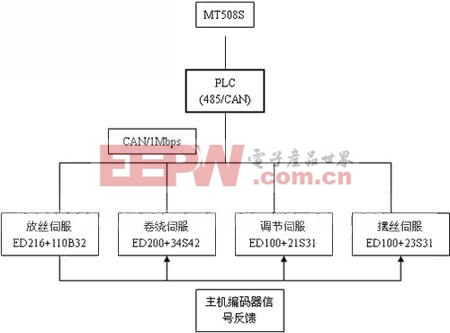
一、系统框图
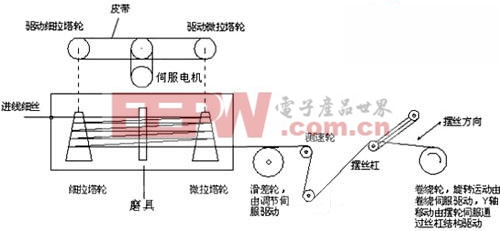
二、工艺流程
1、未拉的丝通过一个阻力装置(主要是一个夹板之类的东西,它用来提供一定的张力,同时也起到了防止线跳的作用),然后进入细拉槽;
2、进入细拉槽的丝在细拉塔轮和微拉塔轮的多次拉制后,成为所需要的丝(两个塔轮间的隔板安放了一个磨具,这个磨具的形状是“〕”,即一边孔大一边孔细);
3、拉细后的丝经过滑差轮,这个轮的作用主要是保持恒定张力;
4、然后丝在经过测速论,这个轮的作用就是测出当前丝的线速度;
5、经过测速轮的丝再经过一个中间环节,然后通过摆丝杆,最后把丝绕到卷轴上;
三、系统控制方案
整个系统要求的控制方案主要有以下4个:
1、放丝伺服的恒线速度控制;
2、调节伺服的跟随控制;
3、卷绕伺服的恒线速度(恒张力)控制,即要求卷绕伺服在半径不断增大的情况下保持与调节伺服的线速度相等;
4、摆丝伺服的位置控制;
因为该系统要求具有总线通讯能力,因此我们在这里选择了我们公司的K4系列带CAN总线的PLC,该PLC采用了标准的CANopen协议,能够传送和接收PDO、SDO,而我们的伺服驱动器也自带了CAN接口,也采用了标准的CANopen协议。这样该方案就就满足了系统对实时通讯数据的要求(CAN总线的通讯速率最高可达1M/S).我们的驱动器也集成了PROFIBUS接口,但是拥有PROFIBUS的PLC不多,而且价格也比较昂贵,采用CAN总线即满足了控制要求,又为客户节约了成本。
四、控制方案介绍
1、放丝伺服的恒线速度控制
该伺服电机的控制采用带加减速的控制模式(3模式)来完成。对于该系统来说,要求主轴放丝电机能够最大程度上抗干扰,能够尽量在一个稳定的速度下运行,同时还要具备平滑的加减速功能。因为系统在启动开始时,要以一个比较低的速度来运行(60R/MIN),然后操作人员在HMI上通过总线把电机手动加速到合适速度(500R/MIN)才开始拉丝,同时在停机的时候也要求电机能够平滑的把速度降下来。驱动器工作在3模式下拥有非常稳定、精确的速度控制能力,完全能够满足上述要求。
小结:PLC通过CAN总线传送速度、加速度命令到拉丝伺服,从而实现拉丝电机平稳运行;
2、调节伺服的跟随控制
该伺服电机的控制采用跟随控制模式(-4模式)来完成。对于该电机来说,这个电机要完全跟随放丝电机来运行,如果跟随时速度出现了大的偏差,那么丝就会被拉断,这样的结果是不允许的!同时该电机的线速度还要求在放丝电机线速度的上下波动,速度波动的范围要在±5%之间可调,这样做的目的是调节丝的张力大小,从而调节丝绕到卷绕轮的张力大小。而驱动器工作在-4模式下时,拥有非常精确、灵敏的速度跟随性,也就是该电机完全随着放丝电机的运行,一起相互加减速、匀速运行。电机的运行速度随着从X7输入脉冲的频率变化而变化,另外输入脉冲的频率经过齿轮比后才得到了真正的电机实际要运行的频率,通过更改齿轮比来实现线速度在±5%之间波动。

伺服电机相关文章:伺服电机工作原理











评论