基于Sunplus SPCE061A控制核心的电动车跷跷板设计及实现
2.3 电源模块
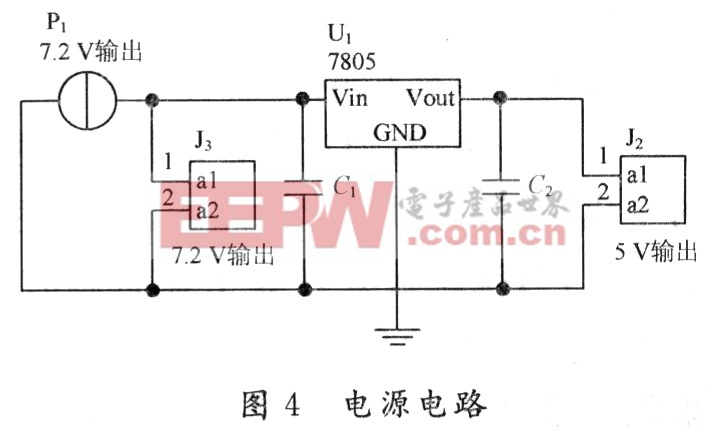
该设计采用6节1.2 V可充电式镍氢电池串联共7.2 V给直流电机和传感器供电,经过7805的电压变换后为单片机供电。经过实验验证,采用此种供电方式后,只有一组电源,便于安装,且直流电机工作良好,单片机、传感器的性能稳定。电路原理图见图4。本文引用地址:http://www.eepw.com.cn/article/163492.htm
2.4 引导模块
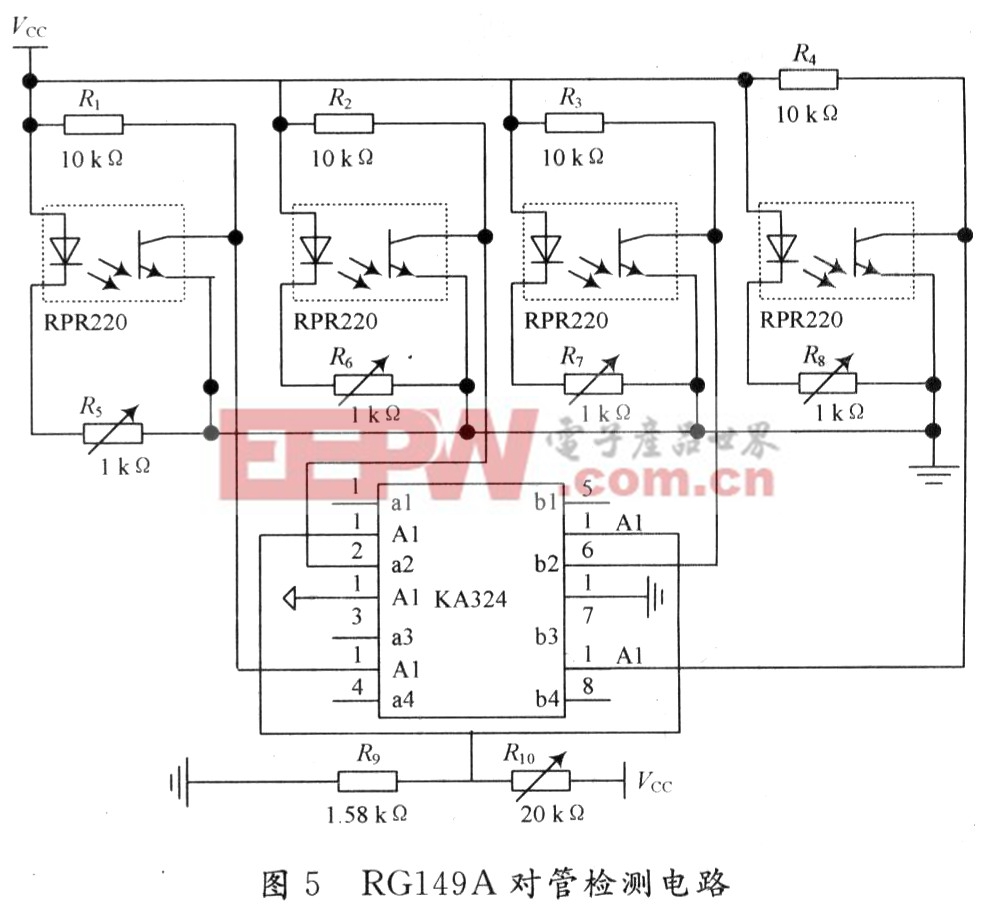
该系统采用黑线引导法,在地面和跷跷板上均画有黑线,用寻迹的方式引导电动车。寻迹采用RG149A光电对管。RG149A通过检测反射信号的不同来区分黑白,信号经LM324整形后传输给控制器。LM324需外接一个滑动变阻器,以找到合适的阻值,使得输出高低电平信号能被正确识别。经过反复试验,寻线效果良好,在直线和弯道都能很准确地实现寻线,而且该管市面上容易购得。其硬件电路图见图5。
2.5 语音模块
在语音模块设计中直接使用凌阳61A板自带语音模块。正如前文介绍,61板具有强大的语音处理功能,拥有语音的MIC输入端,自带自动增益(AGC)控制,具有语音输出接口,可外接喇叭。根据音频处理模块功能的强弱,在录制语音时,需要选择采样率和音频格式,同时还要注意音频文件的大小。
2.6 显示模块
该系统设计采用凌阳公司生产的64×128液晶显示屏模块,该模块自带液晶显示驱动,只需在程序中建立相应字库即可实现显示。因为在显示模块上的工作可以近似认为是一种实时性的,并且数据量大,这就需要在软件的编写上进行合理的安排,以使CPU及时响应和协调各功能子模块的正常工作。
2.7 平衡模块
该设计使用无触点磁敏电位器自制重锤角度传感器。在电位器上加一重锤,通过重锤的摆动角度带来电位器角度的变化,以实现对角度的测量。该角度传感器安装在电动车上,当跷跷板处在非平衡状态时,车体的倾斜角度反映在重锤的转角上,再通过A/D转换将角度信号采集到处理器中进行相关的处理。在本设计中,有三个关键角度值,即跷跷板上平衡区间的两端点角度值和平衡区间中的实际中点值。小车在自动找平衡时,是根据平衡区间的端点值判断自己是否处于平衡区,是则调用平衡区功能函数进行工作,直到最终找到真正平衡点。经过多次试验论证,小车能够快速准确地寻找到平衡点。原理图及实物图见图6。

3 程序设计
软件设计与工作流程图如图7所示。

4 理论分析与计算
4.1 角度传感器原理
当电动车处于水平状态时(此时跷跷板平衡),角度传感器重锤成自然下垂状态,此时得到一电压值作为基准电压;而当电动车处于非水平状态时(此时跷跷板失衡),重锤会随着跷跷板的倾斜角度而偏离原位置一定角度,从而产生电压信号的变化,控制器根据电压信号变化及趋势来控制电机。
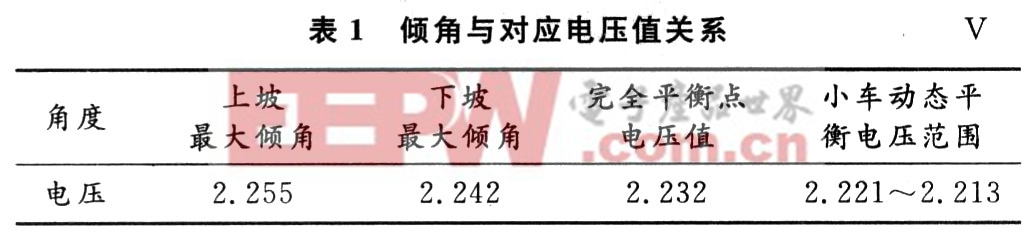
在本系统中当角度传感器的工作电压为3.3 V时,则应用角度传感器关键值可以参照表1。
4.2 过程逻辑计算
在不加配重情况下,电动车从起始A出发到中心平衡点C的过程中,小车从A点快速前行至超过平衡点的下降点处,会检测到倾斜角度电压值有突然减小趋势。此时,小车停止使角度传感器稳定,之后小车根据倾角传感器的电压值倒车至平衡点附近,然后以小速度不断调整寻找实际平衡点,直至平衡。












评论