基于预测控制的自适应PID控制器设计与仿真
2 基于GPC的自适应PID控制器设计
2.1 GPC算法描述
广义预测控制(GPC)采用CARIMA模型描述被控对象:
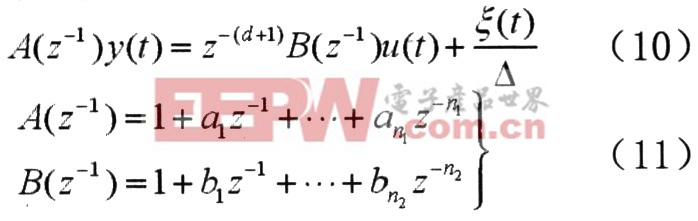
其中,
式中,ζ(t)为均值为0、方差为σ2的白噪声序列,d为系统延迟。
系统二次型性能指标函数为:
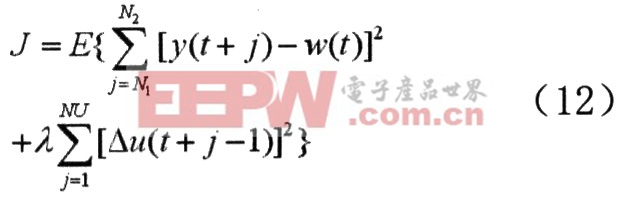
式中,入为控制增量加权因子,N1、N2、和NU分别为最小预测时域、最大预测时域和控制时域。为简化计算,通常令NI=1,N2=NU=N。
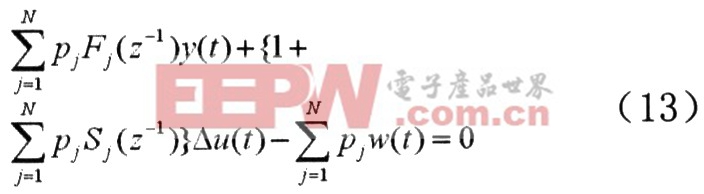
对式(12)J极小化后求得二次型性能指标函数的最优解为:
式中![]() 可通过如下丢番图方程计算:
可通过如下丢番图方程计算:

其中,

且P(z-1)被定义为:

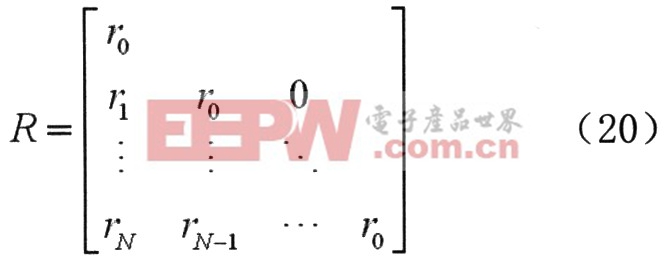
其中Pj可由下式计算:

式中R阵由式(12)中的Rj(z-1)系数构成,
另外,A被定义为:

2.2 PID参数整定
其中,

如果下式

成立,那么式(22)与式(4)恒等,并且可以得到
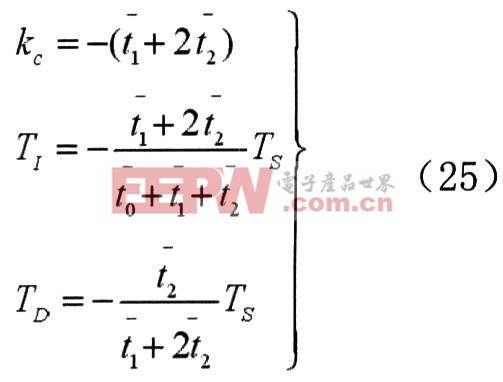
其中,


pid控制器相关文章:pid控制器原理















评论