具有高精度的悬浮轴振动测量传感器的设计
由此,只要获得合理的计数时间△T,就可以得到2个频率信号的计数差值,设计时,△T是利用单片机计数光电编码器的输出脉冲确定的。由于光电编码器采样的时间间隔约为111μs,一个采样周期内除了计数外,必须留有计数值的记录和运算时间,所以,选取ΔT=100μs111μs,由式(10)可知计数器的读数差值与频率的关系为
![]()
差频计数器的启停信号是由单片机控制的。当单片机启动控制信号GEP为高电平后,差频计数器开始等待计数。差频计数器的被测频率信号是由2个与门控制输入的。在每个采样周期到来时即单片机接收光电编码器脉冲e1为上升沿后,单片机分别检测2个振荡器的输出频率信号osc11,osc21,等待osc11,osc21信号的第一个上升沿,分别发出控制信号f1,f2启动与门,使差频计数器接收对应的频率信号并进行计数,同时,单片机对应的内部计数器开始定时,定时时间为△T。定时时间到△T后,单片机关闭差频计数器的对应输入信号的闸门,读取差频计数器的计数值,并对计数器进行清零处理,当2个计数器均完成计数后,单片机开始对D1,D2进行数字处理。差频计数器被测频率信号与定时控制信号之间采用了同步锁定的方法,并分别对2个频率信号计数,这样就消除±1的计数误差。振荡器输出为高频信号,因此,一个采样周期内2个频率信号第一个上升沿到来的时间间隔不会大,即每个采样周期内都能完成对2个频率信号的ΔT间隔计数,周而复始就实现了整个差频计数的功能。差频计数器的工作时序如图4。图中,1为单片机的启停控制信号CEP,2为编码器的输出信号e1,3为测量传感器的频率信号osc11,4为与门1的控制信号f1,5为被计数器1计数的频率信号osc12,6为温度补偿传感器的频率信号osc21,7为与门2的控制信号f2,8为被计数器2计数的频率信号osc22。

2.2.3数据的处理
由于悬浮轴振动位移与单片机输出计数值成单值函数关系,最后,利用C8051F020单片机编写软件程序把计数差值转换成振动的位移量实现振动位移的存储和分析。其中,振动位移分别用2个字节进行存储,振动位移的正负根据减法器的进位位确定,它存储在一个独立的单元中,设定00H表示振动为正,01H表示振动位移为负。
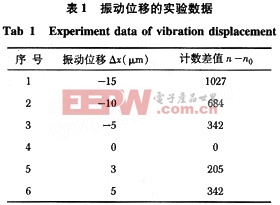
综合式(2)、式(3)、式(6)、式(11)可以推导计算出振动位移与计数器的差值之间的关系如表1。
3结束语
悬浮轴振动测量传感器能够测量振动频率小于4.5 kHz,振动范围在-25~25 μm内的振动位移量,实现了转动时对其振动位移的测量,同时,避免了对本身运动规律的干扰,而且,硬件采用差频测量、光电编码器控制等角度采样,结合软件的数据处理,在很大程度上提高了测量精度,消除了传感器调理电路电源波动、环境温度变化、分布电容的影响,还能屏蔽电磁干扰,保证了测量结果的可靠性,可应用在特殊的测控环境中。









评论