基于Matlab的CDMA系统功率控制算法研究
式中:ωn=ωmcos(2πn/N),n=1,2,…,N0;φN是最大多普勒频率正弦曲线的初始相位,φn=第n个多普勒频移正弦曲线的初始相位。移动台的速率为50 km/h(13.9 m/s),多普勒频移fm=41.6 Hz。N0=8,φN=0。采用Matlab进行仿真,如图5所示。
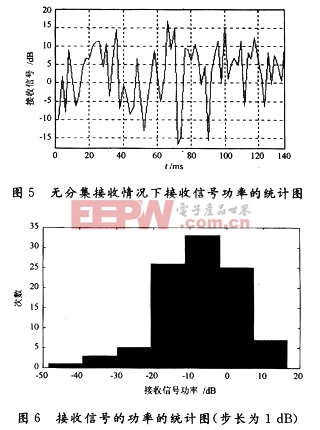
从图5可看出,固定步长功率控制算法在无分集接收情况下,接收信号有很强的“过冲”现象,这是由于系统根据上一时刻的接收信号的功率的强度来决定下一时刻的功率调整方向,而且每次的功率控制在系统出现深度衰落的时刻,就会无法即时补偿,而在控制误差很小时,将引起很大的波动。接收信号的功率的统计图如图6所示。
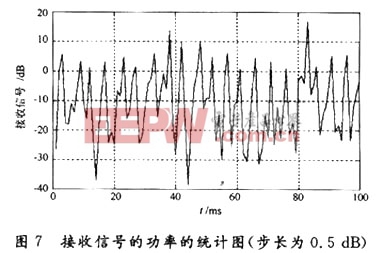
从图6可以看出,实际接收的信号在期望值的附近波动,而且分布的两边是非对称。比较步长为1 dB的图6和步长为0.5 dB的图7,可发现在相同的衰落情况下,步长为1 dB的算法比较适合。从这里也可看出步长的取定与具体环境(如衰落程度和背景干扰)有关,这也是固定步长功率控制的弊端所在。
3结语
这种功率控制算法,允许基站发送功率控制命令,用户通过控制命令,以固定的步长调整发射功率,功率改变的过程就像一个“乒乓”控制,这种控制方法的系统稳定性差,且有很大的过调量和稳定时间。单纯从功率控制的角度,提高控制精度的方法有两种。一是提高功率测量速度,相应地提高功率控制的频度,从而增大相邻的两个样点的相关程度以达到提高控制精度的目的;另一种方法是提高控制量的精调程度,每次控制命令用多个比特来表示,从而提高控制精度。

cdma相关文章:cdma原理












评论