移动机器人无线实时反馈控制系统的设计
在连续控制系统中,PID控制算法的控制规律可以写成如下的形式:

式中,u(t)为PID控制器的输出,也称为被控对象的控制输入;ε(t)为偏差; Kp为比例系数;Ti为积分时间常数;Td为微分时间常数。为了在数字控制系统上实现PID控制,需将连续PID控制规律化成离散型的PID控制规律,即用差分方程表示。为此,取T0为采样周期。由于采样周期远小于信号变化的周期,可以用矩阵面积求和的方法近似式(1)中的积分作用,用向后差分的方法近似微分作用,则式(1)可以化为:

式(4)称为PID控制器递推公式。应用(4)式计算采样时刻k的控制器输出u(k),可以极大地节省计算机内存空间和计算时间,使实时控制成为可能。
许多控制系统的执行机构本身具有记忆功能,例如步进电机作为执行元件,具有保持历史位置的功能,当控制器给出1个增量信号时,执行机构在原来位置上移动某一定位置,达到新的平衡位置。在这种情况下,需要采用增量型PID控制算法。设被控对象的控制输入增量为Δu(k),即:
 本文引用地址:http://www.eepw.com.cn/article/163152.htm
本文引用地址:http://www.eepw.com.cn/article/163152.htm式(5)称为增量型PID控制算法。
增量型PID与位置PID控制算法,本质上是一样的,仅在计算方法上有所变化。增量式算法一般用于步进电机之类的对象,但由于本文所用到的机器人的电机为非步进电机,它所输入的控制量应为绝对数值。所以本文采用位置式PID算法[5]。
对于PID 3个参数的调节有各种不同方法,在本实验中主要是试凑法。试凑法也要遵循一定的规律,一般来说,增大比例系数Kp,将加快系统响应速度,减少系统静态误差,但直接影响系统的稳定性。增大积分时间常数Ti,有利于提高系统的稳定性,但同时也加大了系统消除稳态误差的调节时间。微分控制作用,将改善系统的动态性能。
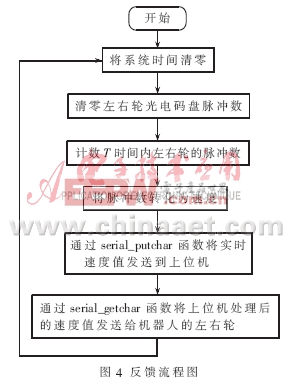
在整个反馈系统的设计中,还有一个重要问题就是系统的采样时间T,本系统的采样时间不能设置得太短。由于机器人的测速是由光电编码器来完成,而实验中用到的码盘条纹只有66等份,时间太短,测速不准确,同时因微分作用加强,使得速度值抖动很大。此外,机器人本身存在非线性特性,这样就必须选择一个合适的采样时间。经过实验,当采样时间≥0.5 s时,机器人反馈回来的速度较平稳,抖动明显减小。整个反馈控制系统的程序流程图如图4所示。
4 仿真结果分析
通过调节PID的3个参数,记录下机器人每次输出的速度值,然后再用MATLAB进行仿真,通过测得实际数据的仿真图如图5所示。
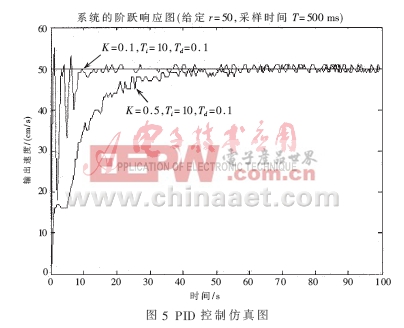
本文提出的PC机对机器人的无线实时反馈控制,在20 m以内的距离都可以实现,且实时性良好。对每一个采样时间内反馈回来的数据PC机都能及时处理,并把它送回给机器人,这样机器人实时地接收数据、实时地接收PID校正后的运动状态,因此机器人就可以按事先设定好的状态行走,从而达到了控制的目的。

pid控制器相关文章:pid控制器原理







评论