异步电机无速度传感器矢量控制系统研究
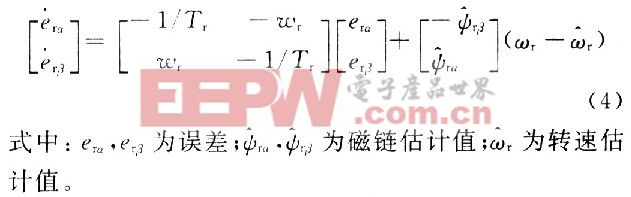
依据波波夫超稳定性理论求解稳态误差,设计出比例加积分的自适应律为:

式中:ki,kp为可调系数;ω0为给定估算转速初值,可以任意给定,取ω0=0。至此,构建出基于模型参考自适应方法的转速辨识模型。
2 仿真模型的建立
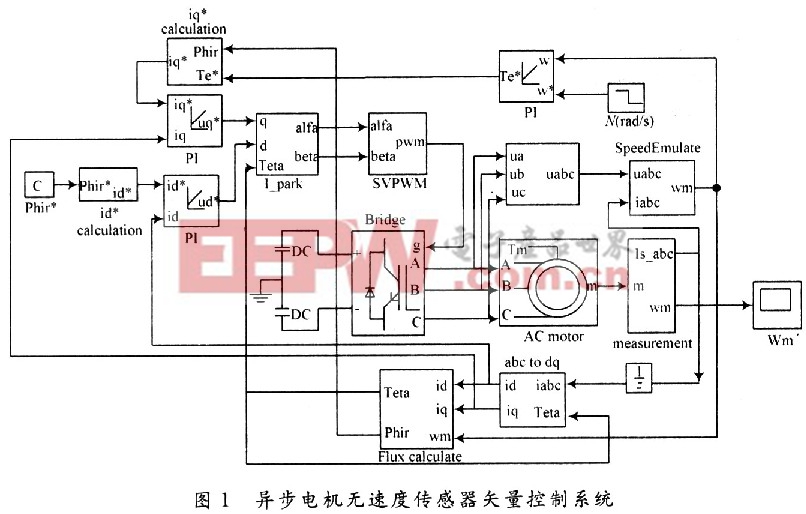
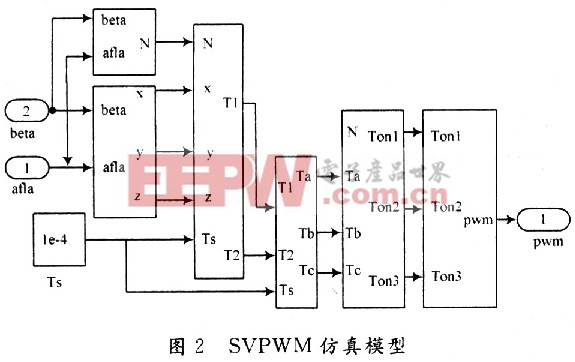
异步电机无速度传感器矢量控制系统如图1所示,主要包括三相异步电机模块,SVPWM模块,PI模块,坐标变换模块,转子磁链估算模块,转子转速估算模块,逆变器模块等。该系统主电路采用SVPWM调制逆变器,控制电路中,给定转速与估算转速经过速度调节器得到转矩,与估算磁链值计算得到电流isq,经过电流调节器,再经过PARK逆变换得到两相静止电压,经过SVPWM调制,控制逆变器电压输出,进而控制三相异步电机。SVPwM控制的基本思想是将电机与逆变器看成一个整体,最终在电机内部形成圆形磁场,以达到更好的控制效果,SVPWM控制的仿真模型如图2所示。
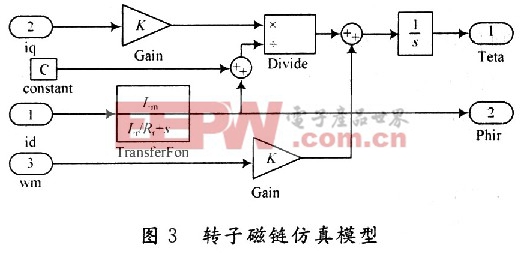
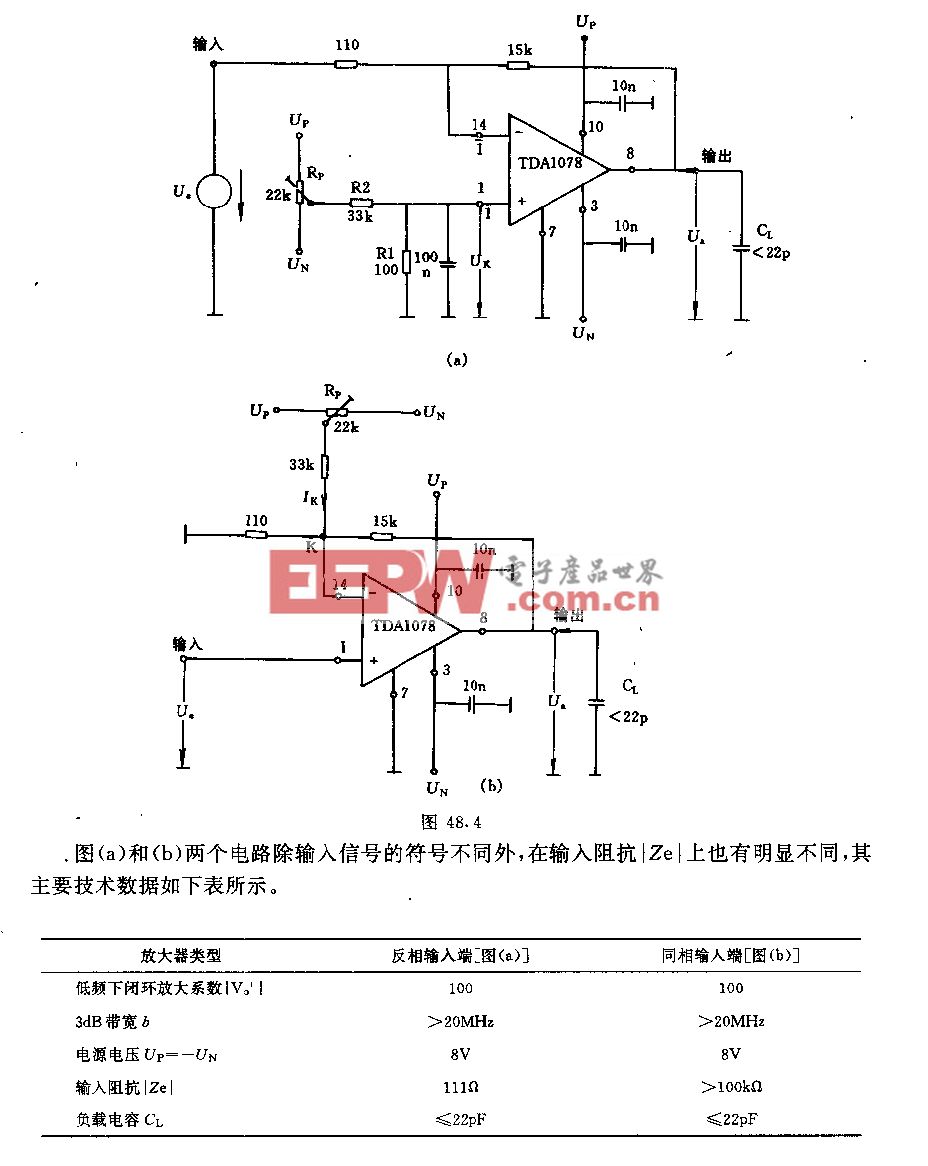
异步电机转子磁链依据式(1)估算,仿真模型如图3所示。异步电机转子转速估算模型如图4所示,依据转子磁链观测电压模型与电流模型,采用MRAS法辨识。在仿真调试过程中,加入一阶传函近似为低通滤波器,对输出估算转速进行处理。仿真结果有明显的改善。












评论