多变量系统辨识及其PID解耦控制的研究
随着现代工业的发展,越来越多的工业系统、社会和经济系统己不再局限于单变量系统,而是结构复杂,模型不确定的多变量系统。传统控制方法虽然在很大程度上能满足工业系统的控制要求,但对一些具有强耦合性、不确定性、非线性、信息不完全性和大滞后性等特征的工业控制系统,传统控制方法对其无法得到满意的控制效果所以多变量系统控制的研究越来越受到重视。而要对多变量系统进行控制,尤其是实施一些先进控制算法,如预测控制、内模控制等都是基于模型的,所以系统的模型是实施多变量控制的前提条件。
1 模型辨识方法
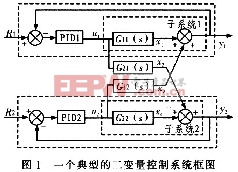
图1是一个典型的二变量控制系统框图。从图1看出,模型的辨识就是辨识出G11(s)、G21(s)、G12(s)、G22(s)这4个传递函数。这里采用基于频域的阶跃响应方法进行辨识。对于PID控制系统,其控制器输出u和过程输出y之间的传递函数G(s)表示为:

将其离散化后用jω代替s变为

对于过程频率响应,取ωi的范围为[-π,0]能够充分体现系统频率特性,为了获得更精确结果,把π分成M个区间。计算ωi值
![]()
其对应的相位角
![]()
由于控制过程中大部分系统可以用二阶加滞后模型代替,所以设模型传递函数为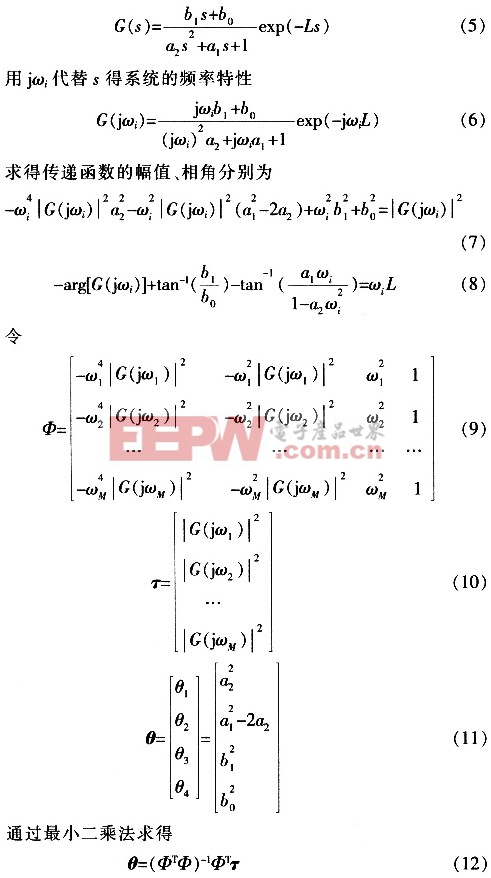
从而得出传递函数模型参数。

pid控制器相关文章:pid控制器原理














评论