NNC-PID控制器对电液位置控制系统的DSP实现
、A18通过由逻辑门器件74AC04和74LVC32组成的译码电路后形成片选信号
本文引用地址:http://www.eepw.com.cn/article/162840.htm,从而实现了对IS61LV25616的读写控制。
神经网络是一个高度非线性的超大规模连续时间动力系统,具有大规模并行分布处理、高度的鲁棒性、自适应性和学习联想等能力,它能很好地自适环境变化,自学习修改过程参数,这些特性为神经网络应用到电液位置伺服系统控制中提供了巨大的潜力。
3.1 神经网络PID控制系统结构
神经网络PID控制系统结构如图3(a)所示。从控制系统框图中可以看出,神经网络PID控制包括两个控制子模块:NNI为被控对象模型辨识器,NNC为神经网络PID控制器。NNC-PID控制系统的工作原理是:首先获取实际被控对象的输入输出样本对,然后利用NNI对被控对象进行离线辨识,当辨识精度达到设定的要求时,通过实时调整NNC的权值系数,使系数具有自适应性,从而达到有效控制的目的。
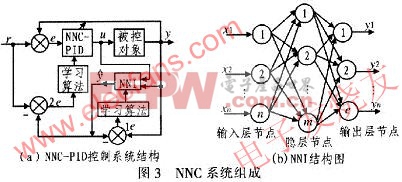
3.2 神经网络辨识器(被控对象模型辨识器NNI)
神经网络辨识器NNI采用3层串并联BP网络实现,包括输入层、隐层、输出层,其结构如图3(b)所示。网络的输入是被控对象的输入/输出序列[u(k),y(k)],网络的输出为教师信号
。
网络隐层的输入输出为:

3.3 神经网络NNC-PID控制器(单神经元自适应NNC-PID控制器)
由于被控对象模型不确定、不确知,并且存在着外界随机扰动,为了达到较高的控制精度,在被控对象模型离线辨识的基础上,采用单神经元自适应NNC-PID控制器结构,如图4所示。
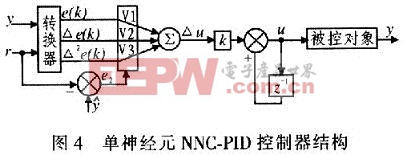
网络的权值系数值V=[v1,v2,v3],即表征PID控制器的3个系数KP,KI,KD。,网络的输入为X=[x1,x2,x3],即表征3个输入参数e(k)、△e(k)、△2e(k),网络的输出为△u(k)。
有监督的Hebb学习规则,通过对权系数的调整来实现自适应、自组织功能,控制算法和学习算法如式(10)和式(11)所示。

pid控制器相关文章:pid控制器原理









评论