基于CAN总线的多天线控制器设计及PID实现
2 方位传感器的数字化设计
在对天线位置信息的采集中,方位传感器采用同步机电路实现。其中,定子线圈加入工频激磁电压,转子的三相电压幅度受定子与转子相对角度的调制,三个转子线圈之间相互间隔120°放置。在模拟信号传输中,同步接收机会根据三相电压幅度的变化跟随同步机做同步旋转,达到传输角度信号之目的。为了便于与微处理器的连接,输出的方位信号还必须做数字化处理。
设同步机定子加激磁电压Vo=Vmsinωt,三个转子线圈的电压方程为:
式中:K为转子绕组与定子绕组的变压比;θ为转子相对于定子的转角;ω为工频激磁电压的角频率。
由此可知,在激磁电压正峰值时,对三个电压取值,则V1,V2,V3与转角θ的关系为:
将转角θ从0~360°划分为12个区间,每个区间30°,则可将同步机三相电压幅度随转子角度变化的曲线绘制如图2所示。
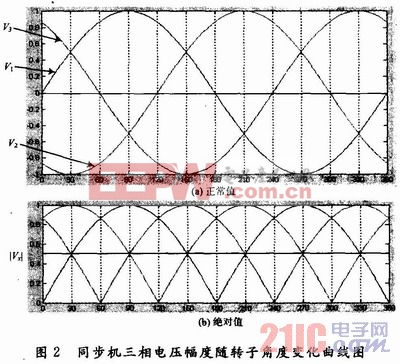
如果用V1-V2,V2-V3,V3-V1以及V1,V2,V3中绝对值最小的信号Vx的极性来表示这12个区间,则很容易得到各区间的二进制代码,如表1所示。例如:当θ角在0~30°时,V1-V2为正,V2-V3为负,V3-V1为正,而此时V1的绝对值最小,即Vx=V1,其值为正,则该区间可以用(10 11)B表示。

进一步,对此时的Vx信号做归一化处理后再进行反正弦运算,其结果是单调的,且计算出的角度值α介于0~30°之间。根据θ角所在的区间,就可求出当前天线的方位。
根据以上分析,可以将方位信号数字化过程简述如下:在激磁工频信号的正峰值点生成采样脉冲信号CP0和微处理器中断信号CP1,控制三路采样保持电路同时对分压后的同步机三相电压进行采样保持,选择绝对值最小的一路信号送A/D转换器,同时判断其正负;区间代码生成电路根据对三路采样信号的比较和最小信号的正负,确定θ角所处区间的代码;微处理器响应中断,启动A/D转换,求得α值,同时读取θ角所处区间代码,根据表1给出的区间计算公式,确定θ角的具体数值送本地面板显示,并通过CAN总线上传天线控制器。














评论