多传感器信息融合技术在车载自诊断系统的研究
多传感器融合判定原理如图1所示。本文引用地址:http://www.eepw.com.cn/article/162419.htm

2 Bayes推理方法
Bayes推理方法算法如下:汽车运行过程可以看成是一个随机过程,根据先验知识对故障做出概率估计称为先验概率,记为P(ωi),(i= 0,1,2,…,c);P(ω0)表示正常工况的概率,P(ωi),(i=1,2,…,c)表示c类故障发生的概率。将故障样本X=(x1,x2,…,xn)作为输入模式样本,P(X|ωi)(i=1,2,…,c)表示输入模式的c类条件概率密度函数。根据Bayes公式:
式中:P(ωi|X)是已知条件下ωi出现的概率,称为后验概率。因此如果满足下面Bayes规则,则x∈ωi,且:![]()
主观Bayes方法中,每条推理规则可以表示为:IF[规则名]THEN H(LS,LN)。其中,LS,LN(≥0)分别称为充分性度量和必要性度量(其数值由专家定),主观Bayes方法推理过程就是根据证据事件的概率P(E),利用规则(LS,LN),事件的系统性能断言的先验概率P(H)更新为后验概率P(H|E),同时H又作为新规则的证据,结合新的规则(LS,LN),进一步计算出新的后验概率。
3 实例
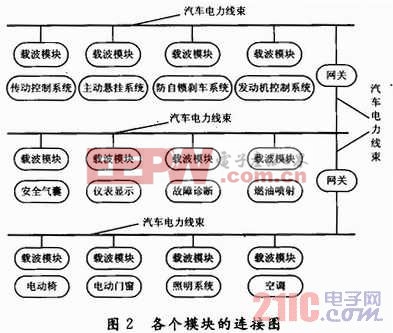
下面用一个汽车的具体实例来说明,如何采用Bayes方法进行故障诊断。汽车系统运行中经常出现各种各样的故障,执行元件故障是其中最常见的一种情况。引发故障的原因很多,大致归纳是由传动控制系统、主动悬挂系统、防自锁刹车系统、发动机控制系统、安全气囊系统、仪表显示系统、各个故障诊断系统、燃油喷射系统、电动车门系统、空调系统、照明系统、电动椅系统、排放控制系统、车身稳定系统、防盗系统的匹配、汽车噪声的检测这16个部分的不同故障可能的原因所引起。
从图2可看出,引起执行元件故障的因素有很多种。其中,执行系统动作的不稳定是故障的主要现象之一,排气不良、工作油质不良等多种故障都可能导致执行元件的动作不稳定,因此这种故障是连锁性质的,不是简单的一一对应关系。通过对汽车系统这类故障的统计,可以得到各部位发生故障的几率具有一定的先验统计规律,上例的简单统计如表1所示。












评论