移相全桥ZVSDC/DC变换器的极点配置自适应预测控制
5 Matlab仿真结果
变压器副边与原边的匝数比n=1∶3;谐振电感L1=17μH;滤波电容C=470μF;滤波电感L=360μH;开关频率fs=100kHz;Rd=4n2Lrfs;开关周期Ts=10μs;输出电压为U=50V。在这里设置希望配置的极点(Z域)为0.4+0.5j和0.4-0.5j,但它不一定是最优化的极点。
为了测试这种控制策略的有效性,进行以下仿真。
1)在设定初始占空比D=0.28时,系统从初始
零状态到稳态时的输出电压仿真波形,如图6所示。
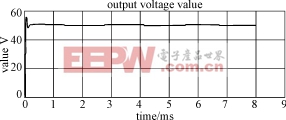
图6 初始状态到稳态过程的输出电压仿真波形
从图6中可以看出控制系统经过大约200μs就能达到稳定,超调量为6V,控制系统得动态响应较快。
2)当输入电压由220V突变为180V时,输出电压变化的仿真波形,如图7所示。从图7中可以看出,控制系统在输入电压突变时,从一个稳定状态调整到另一个稳定状态需要大约3ms,输出电压的波动很小,最大为0.12V。
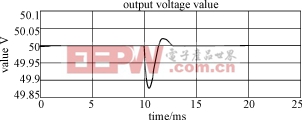
图7 输入电压突变时输出电压变化过程的仿真波形
3)当负载由5Ω突变为10Ω时,输出电压变化的仿真波形,如图8所示。从图8中同样可以看出,控制系统在输出负载突变时,从一个稳定状态调整到另一个稳定状态需要大约3ms,且输出电压的波动很小,大约为0.2V。

图8 负载突变时输出电压变化过程的仿真波形
从以上仿真波形可以看出,使用以上控制算法可使移相全桥变换器有较好的动态响应和稳定性,并且控制算法简单,易于实现。
6 结语
本文介绍了移相全桥变换器采用准线性建模和极点配置自适应数字控制的控制思想。准线性模型可以很好地描述系统在大扰动下的工作特性,极点配置自适应数字控制综合了自适应控制和极点配置控制两者的优点,通过仿真证明了这种控制策略不但算法简单,实现容易,并且可以保证变换器在各稳定工作点都有很好的动态特性和稳定性。另外这种控制策略可以用TI公司的DSP作为主控芯片来实现其数字控制,使得控制系统有更高的稳定性、可靠性和更强的灵活性。










评论