移相全桥ZVSDC/DC变换器的极点配置自适应预测控制
L1为谐振电感;
fs为开关频率。
离散化后可得出其差分方程为
![]() (2)
(2)
2.2 稳态工作点模型
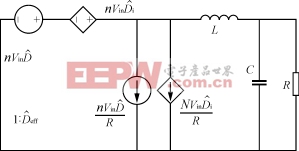
通常,变换器的输出电感电流IL与输出电容电压Vc,随输入电压变化而变化,但在实际中,往往要求开关电源的输出电压维持在一个固定值。假设输出电容串联电阻很小,则输出电容电压就等于输出电压,这样,稳态工作点(Ucop,ILop,Dop)中的输出电容电压Ucop是一个常数,又由于变换器平均电感电流等于负载电流,因此,取其参考电感电流ILop等于负载电流,从而移相全桥变换器在稳定工作时的占空比,可表示为系统稳定点状态变量和系统输入电压的函数。移相全桥变换器工作过程中有占空比丢失的问题,有效占空比Deff为变压器次级占空比,Deff和丢失的占空比ΔD可分别表示为
Deff=![]() (3)
(3)
ΔD=![]() (4)
(4)
式中:T为开关周期。
于是控制用的原边占空比Dop可表示为有效占空比与丢失的占空比之和,即Dop为
Dop=![]() (5)
(5)
它是随着输入电压的变化而调整的,亦即此模型具有前馈控制的特点,对输入电压的扰动具有很强的抑制作用,能有效地保证了系统在大信号扰动下的稳定。
控制系统的动态响应是由系统的极点决定的。移相全桥变换器由于自身的非线性特点,使它的动态特性往往很差,并且可能造成系统的不稳定,因此,需要通过极点配置反馈作用使系统的极点配置到所希望的极点上,从而提高系统的动态特性和稳定度。控制方法是用状态变量IL和Uc同参考值比较所得的误差乘以反馈矩阵-l得到占空比的扰动值,即
D′=-lx l=〔l1-l2〕(6)
将式(6)代入式(2)得
x(k+1)=(A-lB)x(k)(7)
从而系统得特征方程为
det[ZI-A+lB]=0(8)
假设我们根据电源的动态要求,获得了所希望的极点为a1和a2,则系统希望的特征方程为










评论