智能控制在DC/DC变换器中的应用
其中,用神经网络控制器产生变换器的控制信号,进行反馈控制,用神经网络仿真器识别变换器的参数变化。并且神经网络控制系统自动学习变换器工作时的动态特性。由于PWM变换器通常是二阶系统,所以,对于变换器的输入和输出,两个延迟单元是足够的。
由神经网络间接控制的Boost变换器不需要知道雅可比行列式,也不用考虑参数变化,在遇到大信号扰动时,也不需要利用传递函数方法来处理。
计算机仿真结果表明,即使在高频脉冲电源电压和高频脉冲参考信号的条件下,神经网络控制系统都能提供良好的动态响应。
文献[5]把神经网络控制器应用于Buck变换器中。首先,把Buck变换器在一个工作点线性化,进行PI控制,由此得到神经网络离线训练的数据集合,这种训练时间长,并且依赖于数据集合的大小和特性,但是,依然能得到良好的控制结果。而在线训练的神经网络控制器设计的时间少,在变化的负载条件下能够提供最精确和统一的结果。
文献[6]提出用神经网络辨识和控制一个反激准谐振变换器。神经网络控制器用来调节输出电压,它由3层组成,输入层有8个神经元,隐层有24个神经元,输出层有一个神经元。4个输入分别为输入电压变化量,电感电流变化量,负载电流变化量,输出电压相对于参考值的变化量。控制器的输出能够调节输出电压的开关频率。控制方法采用监督学习的神经网络控制,用BP算法,并由Levenberg-Marquedet规则改进。仿真结果表明系统的精度和鲁棒性都得到了改善。这种神经网络控制器的优点可总结如下:
1)降低了输出电压的偏差,提高了控制系统的精度;
2)对于输入电压和负载的变化,具有快速的响应;
3)由于神经网络控制器的输出是开关频率,这可以直接而且很容易完成文中的控制算法。
神经网络和模糊控制在对信息的加工处理过程中,均表示出很强的容错能力,它们在处理和解决问题时,不需要对象的精确的数学模型;从数据处理的形式上看,它们均采用并行处理的结构,当输入信号进入模糊控制系统时,所有的模糊规则将依据条件的适用度决定是否被激发,并且由被激发的规则决定系统的输出。对神经网络而言,它本身就是由并行结构的神经元构成。
但是,模糊系统和神经网络有着明显的不同之处。神经网络虽然对环境的变化具有较强的自适应学习能力,但从系统建模的角度而言,它采用的是典型的黑箱型的学习模式。因此,当学习完成之后,神经网络所获得的输入和输出关系,无法用容易被人接受的方式表示出来。相反,模糊系统是建立在被人容易接受的“IFTHEN”表示方法之上。但如何自动生成和调整隶属函数的模糊规则,则是一个很棘手的问题。
基于以上分析可知,上述两类系统的相似点构成了融合的基础,而它们的不同点又为融合方式研究提供了可能。
神经网络和模糊逻辑有以下几种的相结合方式:
1)神经模糊系统在模糊模型中用神经网络作为工具;
2)模糊神经网络把常规的神经网络模型模糊化;
3)模糊-神经混合系统把模糊技术和神经网络结合起来形成混合系统。
文献[7]提出用神经模糊控制器控制Cuk变换器,如图4所示。由于模糊变量的隶属函数通常是基于专家知识得到的,这要依赖于过去的经验,并不能给出优化的性能。文献[7]利用神经网络设计隶属函数,把神经网络作为隶属函数生成器组合在模糊控制系统中。控制器的输入为电压误差和电压误差变化率,输出为变换器PWM的占空比。神经网络由BP学习算法调节,作用函数为S(x)=![]() 。神经模糊控制器经过离线训练后,用来调节Cuk变换器。通过仿真证明,当负载变化时,神经模糊控制器比PI控制器的动态响应更好。
。神经模糊控制器经过离线训练后,用来调节Cuk变换器。通过仿真证明,当负载变化时,神经模糊控制器比PI控制器的动态响应更好。
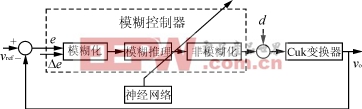
图4 Cuk变换器的神经模糊控制系统
6 结语
目前,智能控制在DC/DC变换器中的应用非常少,还只是停留在仿真阶段,尤其是国内鲜有文章报道。考虑到经济和体积方面的原因,以及智能控制整个理论体系还不成熟,所以,智能控制的DC/DC变换器还需要一定的时间才能应用于实际。但是,随着智能控制应用工程的日益成熟,各种软硬件技术的开发,尤其是最近高速廉价的数字信号处理器(DSP)的应用,大大方便了智能控制应用系统的实现,这使得具有优良性能的智能控制的DC/DC变换器更加受到人们的重视,从而可得到长足的发展。











评论