一种基于混合匹配的指纹识别方法
摘要:为克服传统的基于细节点匹配的不足,对基于点模式匹配算法与改进的2DPCA 匹配算法的混合识别算法进行了改进。改进后的算法在点模式匹配算法中加入改进的2DPCA 算法的初匹配得分权重, 提高了点模式匹配算法的准确性; 并利用点模式匹配算法对2DPCA 算法的匹配结果进行二次匹配,同时也提高了2DPCA 算法匹配的准确率。
本文引用地址:http://www.eepw.com.cn/article/162276.htm指纹识别技术是一种非常重要的生物特征识别技术, 应用十分广泛。指纹识别一般包括指纹图像采集、指纹图像增强、特征提取和匹配几个部分, 其中特征匹配在整个系统中占有重要地位。指纹识别系统中的匹配算法主要分为基于细节信息和基于全局信息两种模式。
目前, 大部分的指纹识别系统都是采用基于细节特征的匹配方法, 即提取细化后的指纹图像的端点和分叉点信息, 采用一定的算法实现匹配。此类算法虽然取得了较好的识别效果, 但是对发生偏移、形变、断纹等低质量的指纹图像效果不佳, 并由于该类方法在提取特征之前要对指纹图像做一系列的预处理, 耗时较长。
本文采用了一种基于点模式算法和改进的2DPCA的混合匹配算法, 能够充分利用指纹纹线中脊线和谷线的全局信息, 弥补点模式算法的不足。
1 基于点模式的匹配算法
本文采用一种在极坐标下基于中心点的指纹匹配算法, 该算法的具体实现步骤如下。
(1) 构造指纹图像特征点的集合, 在预处理阶段计算出指纹图像的特征点及其特征点信息, 包括特征点的坐标FeatureX 与FeatureY、特征点的方向DirectiON 和特征点的类型Type( 包括端点和分叉点)。通过上述信息, 设系统数据库中已存在的指纹图像为P, 其特征点的数量为m, 在线录入的指纹图像为Q, 其特征点的数量为n ,则它们对应的两个点集为:

其中,

(2) 获取中心点CorePoint_X、CorePoint_Y 及中心点的方向CorePoint_Dir。
(3) 以各自图像的中心点为极点, 按照公式将所有的特征点都转换到极坐标下:


通过上述公式转换后, 指纹图像中的任一特征点可以表示为一个四维向量(Radius,θ,Dir,Type)。其中,Radius表示该特征点在极坐标下的极径,θ 表示极角,Dir 表示该特征点在极坐标下的方向;Type 表示该特征点的类型。
(4) 分别将模板指纹P 和输入Q 特征点按照极角递增的方向排序, 形成两个新的特征点集:

(5) 匹配误差值的设定。为了克服指纹出现旋转、形变等非线性形变带来的误差,本文引入了可变界限盒的概念, 如图1 所示, 其中,Rw为两个特征点间的极径允许的误差范围,θw为极角间的允许误差范围。
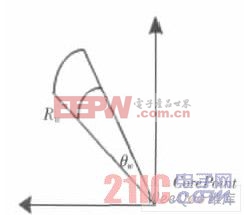
图1 可变界限盒示意图
距离中心点远的特征点有可能发生的位移或形变的幅度较大, 而距离中心点近的特征点往往发生的位移或形变较小, 为减少误判, 将Rw和θw设为两个动态的值, 其具体值由不同的极径决定。











评论