基于RSSI的无线传感器网络距离修正定位算法
但在实际情况中,由于RSSI 测距存在误差,并且由于实际的路径损耗比理论模型的数值偏大,也就是说测量出来的未知点到锚节点的距离d 总是大于实际距离r。以A、B和C 三点为圆心,以da1、db1 和dc1 为半径作圆,三圆将不再相交于点O,而是存在一个相交区域,如图1(b)所示。
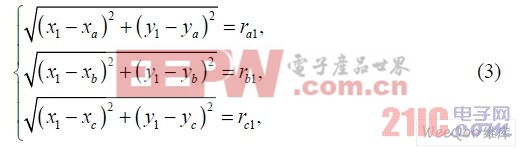
三圆相交区域的边界有三个交点,三点质心为点D。其中点D 的坐标可以通过式(3)求解。
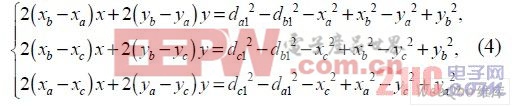
但是二次方程,求解过程计算量较大,因而文中采用如图1(b)所示的点D1 的坐标近似质心D 的坐标。三圆两两相交,则三条交线将相交于点D1。将式(2)中的方程式两两相减,则分别得到每条交线的直线方程,D1 的坐标则可以通过这些直线方程求解,如式(4)。
在某些文章中,以D1 的坐标作为点O 的近似值,其准确度虽然比三边定位等方法要高,但是还是可能存在较大的误差,尤其是当da1、db1、dc1 与ra、rb 和rc 的相对误差各不相同时尤其明显,因而需要对RSSI 方法测出的距离da1、db1和dc1 进行修正,然后再重复地求出新的三线交点D2 的坐标,则可以用点D2 的坐标作为点O 的近似坐标。
设点A、B 和C 到D1 的距离la1、la2 和la3,则总体修正系数如式(5)所示。

根据1.1 节中假设②,距离越远测距相对误差越大,则其修正程度越大,则da1 的修正系统如式(6)所示,db1 和dc的修正系数类似。

修正后的距离da2 通过式(7)得出,db2 和dc2 类似。

2 算法流程
算法流程如下:
①各锚节点以相同功率周期性地向周围广播定位信息,信息中包括节点ID 和坐标。普通节点收到定位信息后,计算同一锚节点的RSSI 平均值;
②当普通节点收集到一定数量的锚节点信息时,不再接收新信息。各普通节点根据RSSI 从强到弱对锚节点排序,由式(1)求出节点到锚节点的距离;












评论