基于ARM7的物流系统自动引导小车控制系统设计
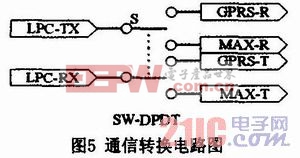
GPRS模块串口工作方式的电平为TTL电平,所以GPRS模块和控制核心处理器的连接可以是直接连接。但考虑到模块的调试及程序的烧录,所以在GPRS模块与处理器连接处使用转接开关。以此完成电脑到处理器的通信、GPRS模块到电脑的通信。GPRS模块、处理器、电脑的通信电路连接示意图如图5所示。本文引用地址:http://www.eepw.com.cn/article/162173.htm
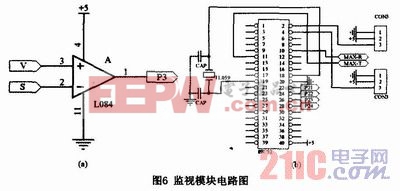
3 监视模块
监视模块采用的是普通高清视频摄像头,分辨率达1024×768。视频采用PAL模式传输经处理器处理,通过无线互联网把图像传输到客户端,其电路图如图6(a)所示。摄像头的各方位由单片机驱动舵机来实现,舵机驱动电路如图6(b)所示。
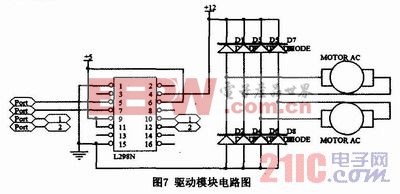
4 驱动模块
驱动模块采用的驱动芯片为L298N,该芯片功率大,电源可直接采用1 2V。单个芯片可以控制两个直流电机,本文采用两片L298N以实现AGV的各方位移动。电路如图7所示。
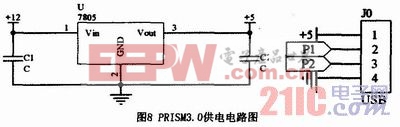
5 电源模块
电源部分采用的是12V直流锂电池,功率为10W。对各个模块部分进行分别供电。稳压管采用的是7805。由于GPRS对电源要求特别高,所以单独采用一个LM2941S对其供电。
wf8000 WIFI模块是华为公司生产的一种专门用于嵌入式系统的无线网络模块。模块符合802.11b标准,芯片采用prism3.0。原理图如图8所示。
6 结论
利用本控制系统,可以实现AGV的远程控制及工作环境实时监控。结合运输机械装置可以实现在特殊工作环境下的智能远程控制搬运工作。在物流系统等一些环境较差的场所可以代替人的工作,实现更多的功能,为货物搬运工作带来便利。















评论